





























www.baldormotion.com
Control System B-5
MN1901
B.2 Control system operation
The following sections describe the operation of the position, speed and torque controllers.
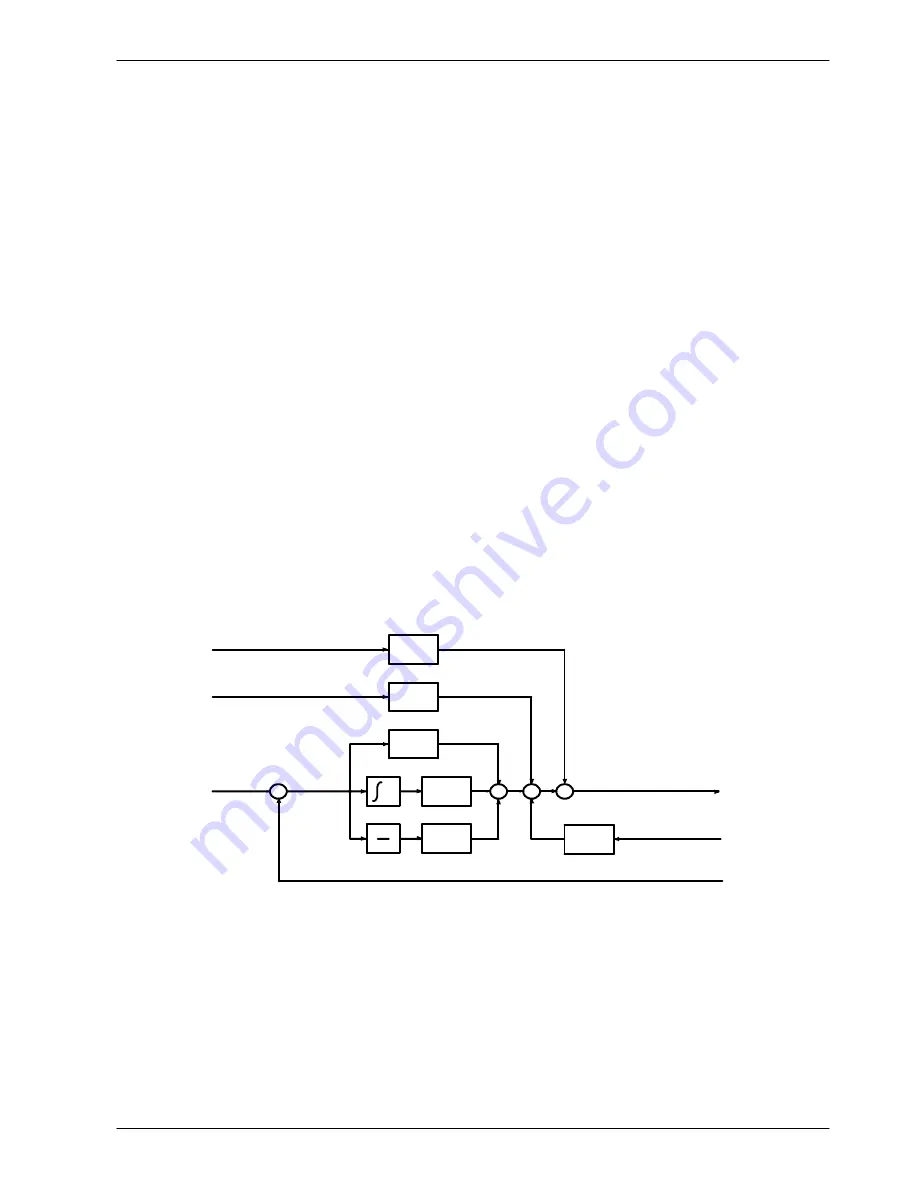
B.2.1 Position controller
The position controller, shown below, is a typical propor in derivative (PID)
controller, with gains set by the Mint keywords
KPROP
,
KINT
and
KDERIV
. The position
demand from the profiler is compared with the measured position and the error is fed into the
PID control calculation. The resulting value forms the basic speed or torque demand,
depending on the
CONFIG
setting. The effect of the integral term can be changed using the
KINTLIMIT
and
KINTMODE
keywords.
KINTLIMIT
sets the maximum value of the effect of
integral action, as a percentage of the full scale demand.
KINTMODE
can be used to specify
the circumstances under which the integral term is applied.
As an alternative to the derivative term, a velocity feedback term is available by setting
keyword
KVEL
. To improve the tracking performance of the position controller, the profiler
speed is fed forward, by gain
KVELFF
, to give a contribution to the final speed or torque
demand. Likewise, if
CONFIG
is set to
_cfTORQUE_SERVO
, the profiler acceleration is fed
forward by gain
KACCEL
to give a contribution to the final speed or torque demand. The
position control calculation is performed every 500
μ
s.
The gain values
KPROP
,
KINT
,
KDERIV
,
KVEL
,
KVELFF
and
KACCEL
must be tuned for each
application. This can either be performed automatically within the Commissioning Wizard, or
manually using the Fine-tuning tool in WorkBench v5.
KVELFF
KACCEL
KPROP
KINT
KDERIV
KVEL
dt
d
dt
Following
error
(FOLERROR)
Proportional gain term
Integral gain term
Derivative gain term
Velocity feedback
term
Measured speed
(VEL)
Speed or torque demand
Measured position
(POS)
Velocity feedforward term
Acceleration feedforward term
(CONFIG _cfTORQUE_SERVO only)
Profiler acceleration
Profiler speed
(VELDEMAND)
Profiler position
(POSDEMAND)
+
+
+
+
+
+
+
+
-
-
Figure 56 - Position control system
Summary of Contents for MDH1A05TB-RC23
Page 1: ...MintDriveII Servo Position Control SERVO DRIVE Installation Manual 01 07 MN1901...
Page 2: ......
Page 14: ...www baldormotion com 2 4 Introduction MN1901...
Page 94: ...www baldormotion com 6 10 Preset Moves PLC Task MN1901...
Page 122: ...www baldormotion com A 10 Accessories MN1901...
Page 130: ...www baldormotion com B 8 Control System MN1901...
Page 158: ...www baldormotion com D 6 CE Guidelines MN1901...
Page 164: ...www baldormotion com Comments MN1901 Thank you for taking the time to help us...
Page 165: ......







































































