





























DRV-28 inverter
s Basic operartion instructions
-51-
Note: If fault occurred, rule out the fault cause according to "fault tracking".
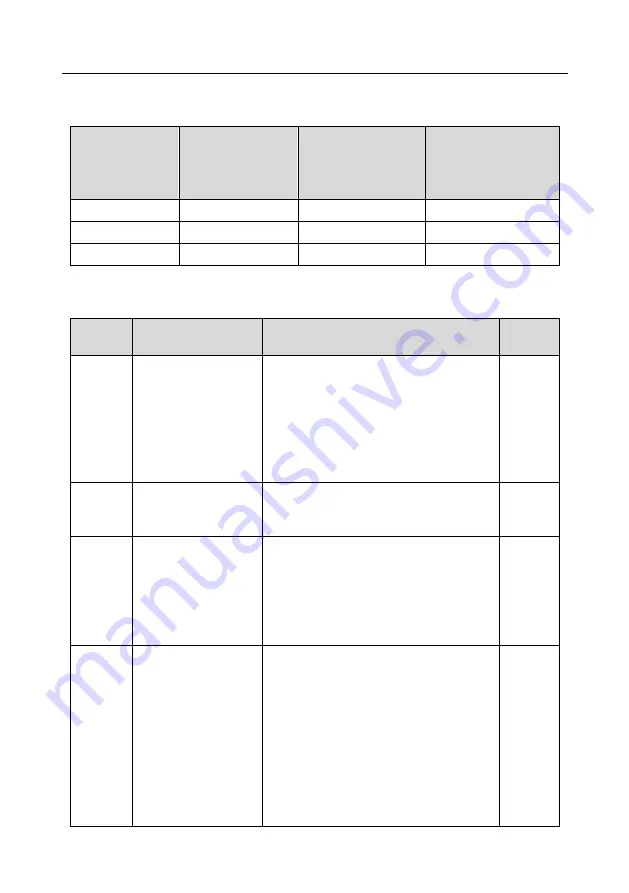
The running command channel can be set by terminal commands besides P00.01 and P00.02.
Current running
command channel
P00.01
Multi-function terminal
function (36)
Command switches to
keypad
Multi-function terminal
function (37)
Command switches to
terminal
Multi-function terminal
function (38)
Command switches to
communication
Keypad
/
Terminal
Communication
Terminal
Keypad
/
Communication
Communication
Keypad
Terminal
/
Note: "/" means this multi-function terminal is valid under current reference channel.
Related parameter list:
Function
code
Name
Detailed parameter description
Default
value
P00.00
Speed control mode
0:SVC 0
1:SVC 1
2:SVPWM
3:VC
Note: If 0, 1 or 3 is selected, it is required
to carry out motor parameter autotuning
first.
2
P00.01
Running command
channel
0: Keypad
1: Terminal
2: Communication
0
P00.02
Communication running
command channel
0:MODBUS
1:PROFIBUS/CANopen/Devicenet
2:Ethernet
3:EtherCat/Profinet
4:PLC programmable card
5:Bluetooth card
0
P00.15
Motor parameter
autotuning
0: No operation
1: Rotary autotuning; carry out
comprehensive motor parameter autotuning;
rotary autotuning is used in cases where high
control precision is required;
2: Static autotuning 1 (comprehensive
autotuning); static autotuning 1 is used in
cases where the motor cannot be
disconnected from load;
3: Static autotuning 2 (partial autotuning) ;
0







































































