





























DRV-28 inverter
s Function parameter list
-140-
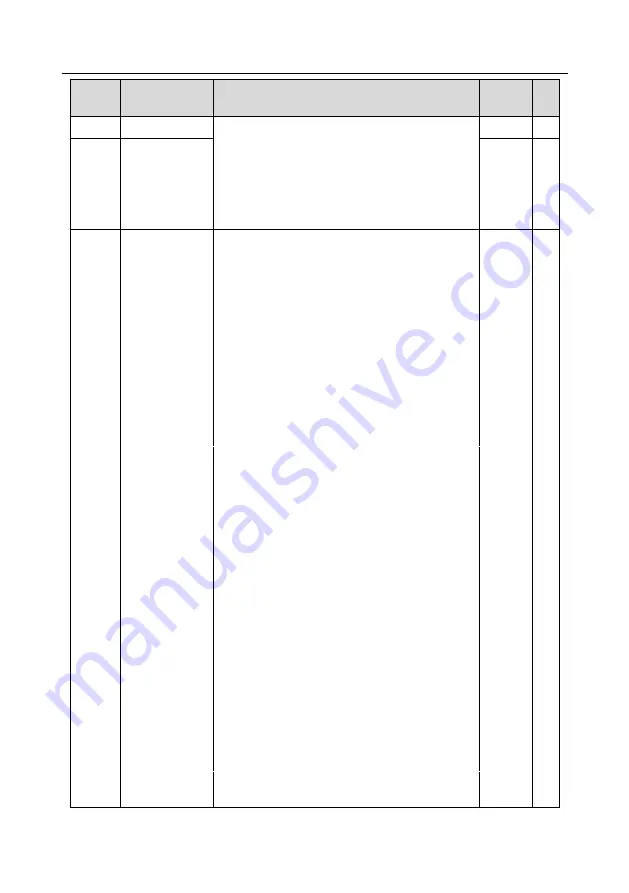
Function
code
Name
Detailed parameter description
Default
value
Modi
fy
(motoring)
Setting range: 50–200%
P03.08
Vector control
slip
compensation
coefficient
(generating)
100%
○
P03.09
Current loop
proportional
coefficient P
Note:
1. These two parameters are used to adjust PI
parameters of current loop; it affects dynamic
response speed and control precision of the system
directly. The default value needs no adjustment
under common conditions;
2. Fit for SVC mode 0 (P00.00=0) and VC mode
(P00.00=3);
3. The value of this function code will be updated
automatically after parameter autotuning of
synchronous motor is done.
Setting range: 0–65535
1000
○
P03.10
Current loop
integral
coefficient I
1000
○
P03.11
Torque setup
mode selection
0
–1: Set via keypad (P03.12)
2: Set via AI1 (100% corresponds to three times of
rated motor current)
3: Set via AI2 (the same as above)
4: Set via AI3 (the same as above)
5: Set via pulse frequency HDIA (the same as
above)
6: Set via multi-step torque (the same as above)
7: Set via MODBUS communication (the same as
above)
8: Set via PROFIBUS/CANopen/DeviceNet
communication (the same as above)
9: Set via Ethernet communication (the same as
above)
10: Set via pulse frequency HDIB (the same as
above)
11: Set via EtherCat/Profinet communication
12: Set via PLC
0
○
P03.12
Torque set by
keypad
-300.0%
–300.0% (rated motor current)
20.0%
○







































































