




























DRV-28 inverter
s Basic operartion instructions
-108-
Functio
n code
Name
Detailed parameter description
Default
value
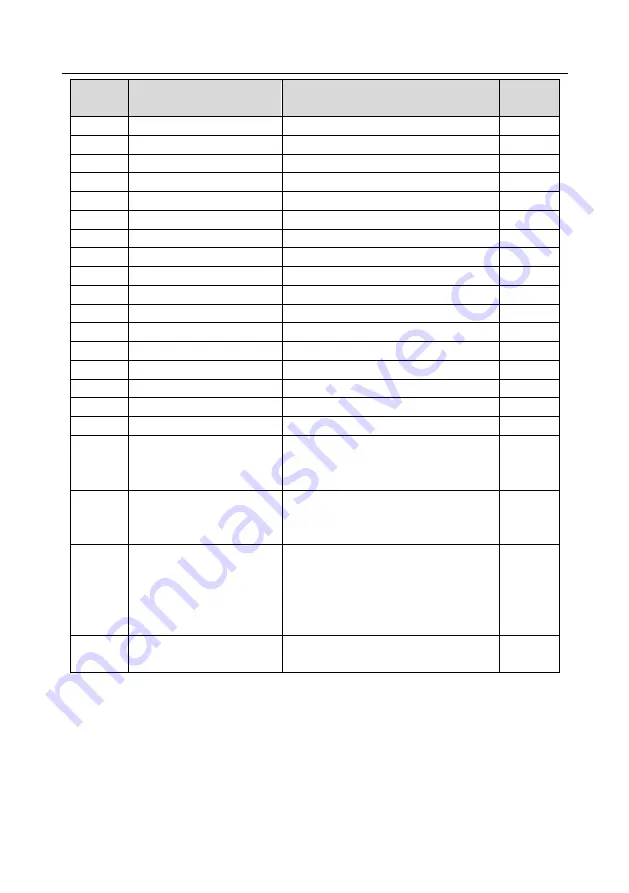
P10.17
Running time of 7
th
step
0.0–6553.5s (min)
0.0s
P10.18
Multi-step speed 8
-
100.0–100.0%
0.0%
P10.19
Running time of 8
th
step
0.0–6553.5s (min)
0.0s
P10.20
Multi-step speed 9
-
100.0–100.0%
0.0%
P10.21
Running time of 9
th
step
0.0–6553.5s (min)
0.0s
P10.22
Multi-step speed 10
-
100.0–100.0%
0.0%
P10.23
Running time of 10
th
step
0.0–6553.5s (min)
0.0s
P10.24
Multi-step speed 11
-
100.0–100.0%
0.0%
P10.25
Running time of 11
th
step
0.0–6553.5s (min)
0.0s
P10.26
Multi-step speed 12
-
100.0–100.0%
0.0%
P10.27
Running time of 12
th
step
0.0–6553.5s (min)
0.0s
P10.28
Multi-step speed 13
-
100.0–100.0%
0.0%
P10.29
Running time of 13
th
step
0.0–6553.5s (min)
0.0s
P10.30
Multi-step speed 14
-
100.0–100.0%
0.0%
P10.31
Running time of 14
th
step
0.0–6553.5s (min)
0.0s
P10.32
Multi-step speed 15
-
100.0–100.0%
0.0%
P10.33
Running time of 15
th
step
0.0–6553.5s (min)
0.0s
P10.34
Acceleration/decoration time
selection of 0–7 section of
simple PLC
0x0000–0XFFFF
0000
P10.35
Acceleration/decoration time
selection of 8–15 section of
simple PLC
0x0000–0XFFFF
0000
P05.01–
P05.09
Digital input function selection
16: Multi-step speed terminal 1
17: Multi-step speed terminal 2
18: Multi-step speed terminal 3
19: Multi-step speed terminal 4
20: Multi-step speed pause
/
P17.27
Simple PLC and current steps
of multi-step speed
0–15
0
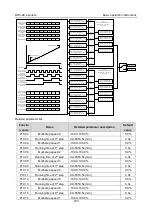
5.5.15 PID control
PID control, a common mode for process control, is mainly used to adjust the inverter output
frequency or output voltage through performing scale-division, integral and differential operations on
the difference between feedback signal of controlled variables and signal of the target, thus forming a
negative feedback system to keep the controlled variables above the target. It is suitable for flow
control, pressure control, temperature control, etc. Diagram of basic principles for output frequency
regulation is shown in the figure below.







































































