




























DRV-28 inverter
s Basic operartion instructions
-53-
Function
code
Name
Detailed parameter description
Default
value
P07.01
Reserved variables
/
/
P07.02
QUICK/JOG key function
Range: 0x00
–0x27
Ones: QUICK/JOG key function selection
0: No function
1: Jogging
2: Reserved
3: Switching between forward/reverse
rotation
4: Clear UP/DOWN setting
5: Coast to stop
6: Switch running command reference mode
by sequence
7: Reserved
Tens: Reserved
0x01
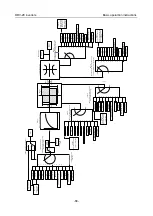
5.5.3 Vector control
Asynchronous motors are featured with high order, non-linear, strong coupling and multi-variables,
which makes it very difficult to control asynchronous motors during actual application. The vector
control theory aims to solve this problem through measuring and controlling the stator current vector
of asynchronous motor, and decomposing the stator current vector into exciting current (current
component which generates internal magnet field) and torque current (current component which
generates torque) based on field orientation principle, and then controlling the amplitude value and
phase position of these two components (namely, control the stator current vector of motor) to realize
decoupling control of exciting current and torque current, thus achieving high-performance speed
regulation of asynchronous motor.
DRV-28 series inverter carries built-in speed sensor-less vector control algorithm, which can be used
to drive the asynchronous motor and permanent-magnet synchronous motor simultaneously. As the
core algorithm of vector control is based on accurate motor parameter model, the accuracy of motor
parameters will impact the control performance of vector control. It is recommended to input accurate
motor parameters and carry out motor parameter autotuning before vector operation.
As vector control algorithm is complicated, users should be cautious of regulation on dedicated
function parameters of vector control.







































































