

























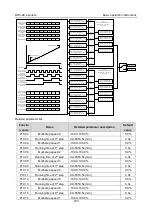



DRV-28 inverter
s Basic operartion instructions
-95-
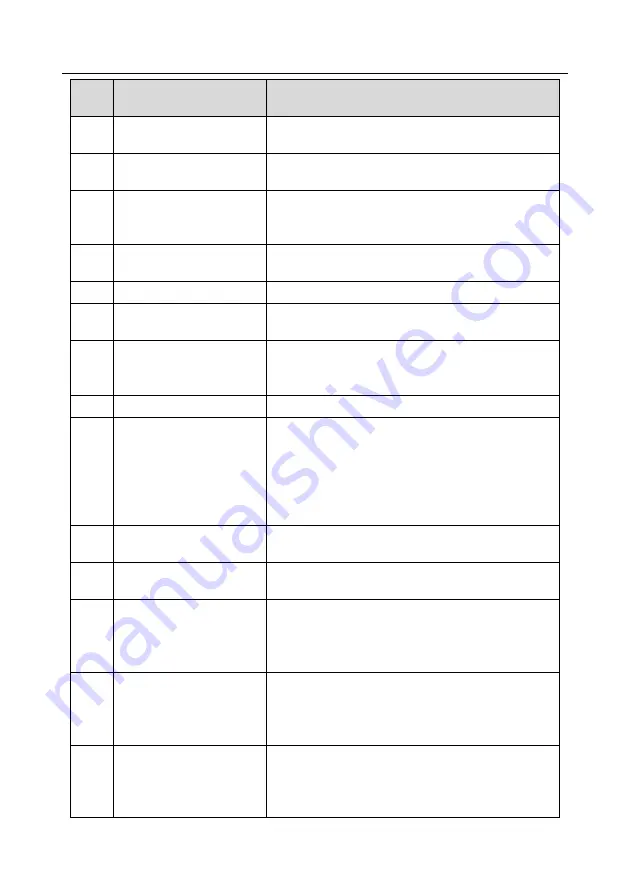
Set
value
Function
Description
running in current speed step. After this function is
cancelled, simple PLC keeps running.
25
PID control pause
PID is ineffective temporarily, and the inverter maintains
current frequency output.
26
Wobbling frequency pause
(stop at current frequency)
The inverter pauses at current output. After this function
is canceled, it continues wobbling-frequency operation at
current frequency.
27
Wobbling frequency reset
(revert to center frequency)
The set frequency of inverter reverts to center frequency.
28
Counter reset
Zero out the counter state.
29
Switching between speed
control and torque control
The inverter switches from torque control mode to speed
control mode, or vice versa.
30
Acceleration/deceleration
disabled
Ensure the inverter will not be impacted by external
signals (except for stop command), and maintains current
output frequency.
31
Counter trigger
Enable pulse counting of the counter.
33
Clear frequency
increase/decrease setting
temporarily
When the terminal is closed, the frequency value set by
UP/DOWN can be cleared to restore the reference
frequency to the frequency given by frequency command
channel; when terminal is disconnected, it will revert to
the frequency value after frequency increase/decrease
setting.
34
DC brake
The inverter starts DC brake immediately after the
command becomes valid.
35
Switching between motor 1
and motor 2
When this terminal is valid, users can realize switch-over
control of two motors.
36
Command switches to
keypad
When this terminal is valid, the running command
channel will switch to keypad compulsorily. If this function
becomes invalid, the running command channel will
revert to the original state.
37
Command switches to
terminal
When this terminal is valid, the running command
channel will switch to terminal compulsorily. If this
function becomes invalid, the running command channel
will revert to the original state.
38
Command switches to
communication
When this terminal is valid, the running command
channel will switch to communication compulsorily. If this
function becomes invalid, the running command channel
will revert to the original state.







































































