





























DRV-28 inverter
s Function parameter list
-201-
Function
code
Name
Detailed parameter description
Default
value
Modi
fy
output
P17.54–
P17.63
Reserved
variables
0–65535
0
●
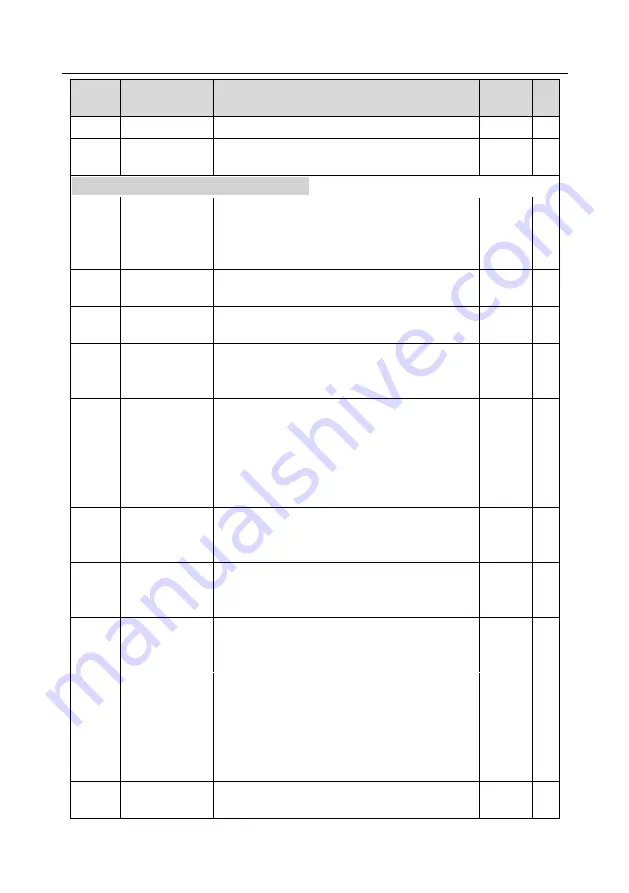
P18 group Closed-loop control state check
P18.00
Actual frequency
of encoder
The actual-measured encoder frequency; the value
of forward running is positive; the value of reverse
running is negative.
Range: -999.9–3276.7Hz
0.0Hz
●
P18.01
Encoder position
count value
Encoder count value, quadruple frequency,
Range: 0–65535
0
●
P18.02
Encoder Z pulse
count value
Corresponding count value of encoder Z pulse.
Range: 0–65535
0
●
P18.03
High bit of
position
reference value
High bit of position reference value, zero out after
stop.
Range: 0–30000
0
●
P18.04
Low bit of
position
reference value
Low bit of position reference value, zero out after
stop.
Range: 0–65535
0
●
P18.05
High bit of
position feedback
value
High bit of position feedback value, zero out after
stop.
Range: 0–30000
0
●
P18.06
Low bit of
position feedback
value
Low bit of position feedback value, zero out after
stop.
Range: 0–65535
0
●
P18.07 Position deviation
Deviation between current reference position and
actual running position.
Range: -32768–32767
0
●
P18.08
Position of
position
reference point
Position of reference point of Z pulse when the
spindle stops accurately.
Range: 0–65535
0
●
P18.09
Current position
setup of spindle
Current position setup when the spindle stops
accurately.
Range: 0–359.99
0.00
●
P18.10
Current position
when spindle
stops accurately
Current position when spindle stops accurately.
Range: 0–65535
0
●
P18.11
Encoder Z pulse
direction
Z pulse direction display. When the spindle stops
accurately, there may be a couple of pulses’ error
0
●







































































