





























12. WHEN USING WITH A GENERAL-PURPOSE INTERFACE
12 - 14
Device
Symbol
Connector
pin No.
Function and application
I/O
division
Control
mode
CP PS
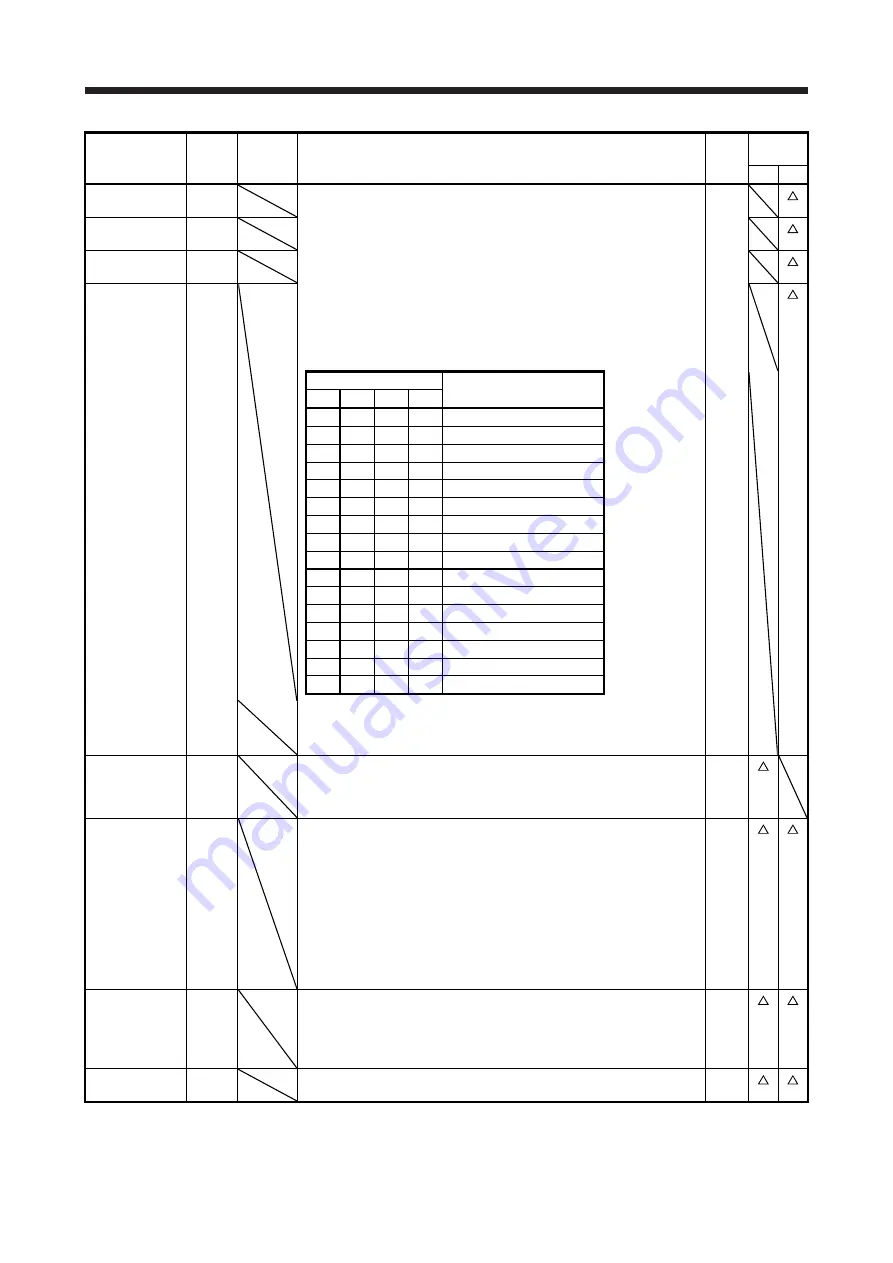
Digital override
selection 1
OV0
To enable the digital override function, set [Pr. PT38] to "_ _ 1 _".
This signal is for multiplying a command speed by the digital override
(multiplying factor).
A command speed multiplied by the digital override value selected with this
signal will be an actual servo motor speed.
If the servo motor speed multiplied by the digital override value exceeds
the servo motor maximum speed, the speed will be limited at the maximum
speed.
The following table shows an example of setting "50" to [Pr. PT42] and "5"
to [Pr. PT43].
DI-1
Digital override
selection 2
OV1
Digital override
selection 3
OV2
Digital override
selection 4
OV3
Device (Note)
Description
OV3 OV2 OV1 OV0
0
0
0
0
100 [%] of command speed
0
0
0
1
50 [%] of command speed
0
0
1
0
55 [%] of command speed
0
0
1
1
60 [%] of command speed
0
1
0
0
65 [%] of command speed
0
1
0
1
70 [%] of command speed
0
1
1
0
75 [%] of command speed
0
1
1
1
80 [%] of command speed
1
0
0
0
85 [%] of command speed
1
0
0
1
90 [%] of command speed
1
0
1
0
95 [%] of command speed
1
0
1
1
100 [%] of command speed
1
1
0
0
105 [%] of command speed
1
1
0
1
110 [%] of command speed
1
1
1
0
115 [%] of command speed
1
1
1
1
0 [%] of command speed
Note. 0: Off
1: On
Touch probe 1
TPR1
The current position latch function can be used by performing the current
position latch by sensor input. For the current position latch function, refer
to section 11.1.1. For the interrupt positioning function, refer to section
11.1.2.
DI-1
Proportional
control
PC
Turn PC on to switch the speed amplifier from the proportional integral type
to the proportional type.
If the servo motor at a stop is rotated even for a pulse due to any external
factor, it generates torque to compensate for a position mismatch. When
the servo motor shaft is to be locked mechanically after positioning
completion (stop), switching on the PC (Proportion control) upon positioning
completion will suppress the unnecessary torque generated to compensate
for a position mismatch.
When the shaft is to be locked for an extended period of time, switch on the
PC (Proportion control) and TL (External torque limit selection) at the same
time to make the torque less than the rated by TLA (Analog torque limit).
DI-1
Clear
CR
Turn CR on to clear the position control counter droop pulses on its leading
edge. The pulse width should be 10 ms or longer.
The delay amount set in [Pr. PB03 Position command acceleration/
deceleration time constant] is also cleared. When " _ _ _1 " is set to [Pr.
PD37], the droop pulses are always cleared while the CR is on.
DI-1
Gain switching
CDP
Turn on CDP to use the values of [Pr. PB29] to [Pr. PB36] and [Pr. PB56]
to [Pr. PB60] as the load to motor inertia ratio and each gain value.
DI-1
Содержание MR-JE-C
Страница 33: ...2 SIGNALS AND WIRING 2 16 MEMO ...
Страница 37: ...3 STARTUP 3 4 MEMO ...
Страница 129: ...6 HOMING MODE 6 36 MEMO ...
Страница 169: ...7 HOW TO USE THE POINT TABLE 7 40 MEMO ...
Страница 203: ...9 HOW TO USE JOG MODE 9 12 MEMO ...
Страница 215: ...11 APPLICATION OF FUNCTIONS 11 8 MEMO ...
Страница 307: ...12 WHEN USING WITH A GENERAL PURPOSE INTERFACE 12 92 MEMO ...
Страница 309: ...MEMO ...






































































