





























12. WHEN USING WITH A GENERAL-PURPOSE INTERFACE
12 - 79
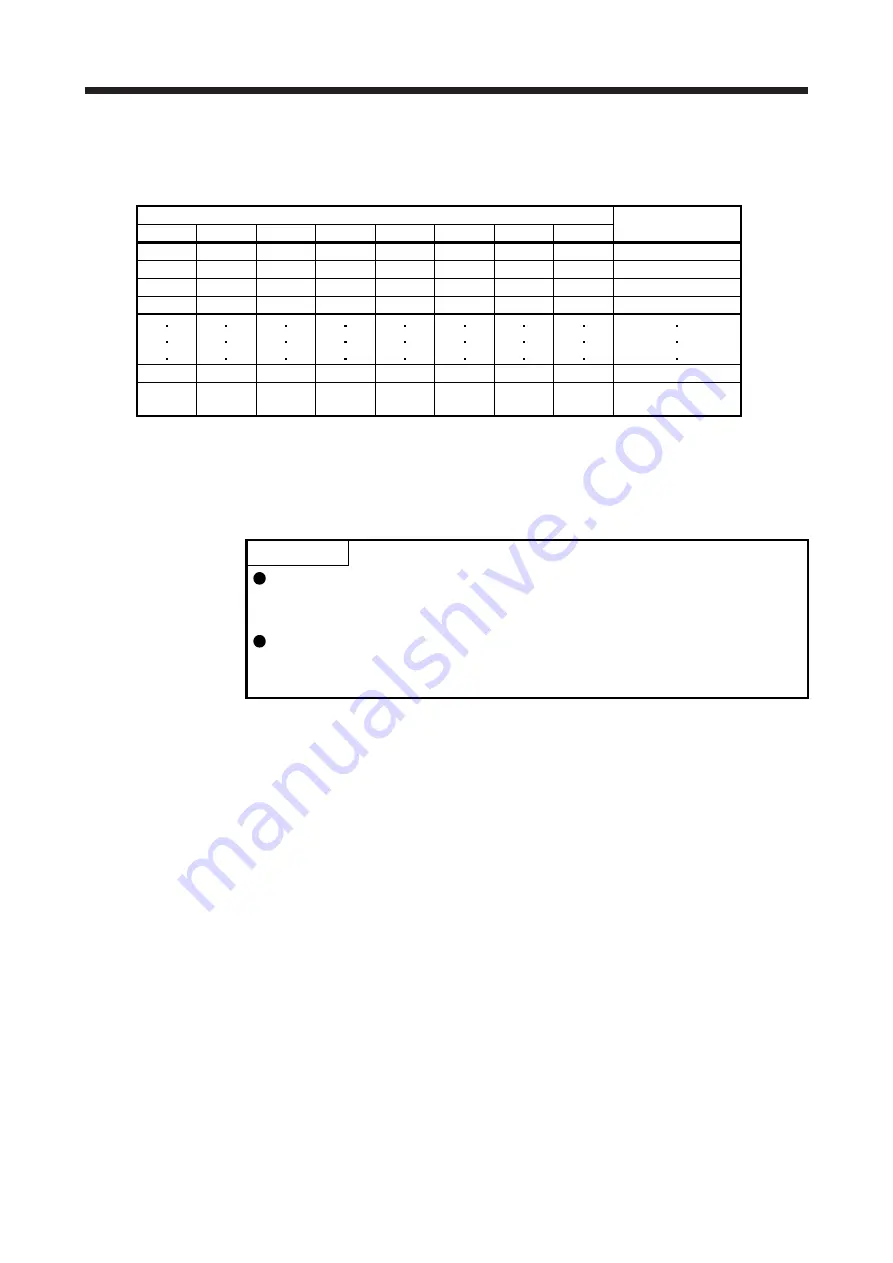
(c) Operation
Select a target station No. using 8-bit devices of the DI0 (Next station No. selection 1) to DI7 (Next
station No. selection 8) for positioning.
Device (Note 1)
Selection contents
DI7
DI6
DI5
DI4
DI3
DI2
DI1
DI0
0
0
0
0
0
0
0
0
Next station No. 0
0
0
0
0
0
0
0
1
Next station No. 1
0
0
0
0
0
0
1
0
Next station No. 2
0
0
0
0
0
0
1
1
Next station No. 3
1
1
1
1
1
1
1
0
Next station No. 254
1
1
1
1
1
1
1
1
Setting inhibited
(Note 2)
Note 1. 0: Off
1: On
2. [AL. 97.2 Next station position warning] will occur.
(d) Timing chart
POINT
Be sure to perform a home position return. Executing positioning operation
without home position return will trigger [AL. 90 Home position return incomplete
warning] and ST1 (Forward rotation start) will be disabled.
When a next station position is over the setting value of [Pr. PT28 Number of
stations per rotation], [AL. 97 Next station position warning] will occur and ST1
(Forward rotation start) will be disabled.
Содержание MR-JE-C
Страница 33: ...2 SIGNALS AND WIRING 2 16 MEMO ...
Страница 37: ...3 STARTUP 3 4 MEMO ...
Страница 129: ...6 HOMING MODE 6 36 MEMO ...
Страница 169: ...7 HOW TO USE THE POINT TABLE 7 40 MEMO ...
Страница 203: ...9 HOW TO USE JOG MODE 9 12 MEMO ...
Страница 215: ...11 APPLICATION OF FUNCTIONS 11 8 MEMO ...
Страница 307: ...12 WHEN USING WITH A GENERAL PURPOSE INTERFACE 12 92 MEMO ...
Страница 309: ...MEMO ...







































































