





























4-128
10-27
PID Feedback Display Bias Default: 0
Range
【
0–9999
】
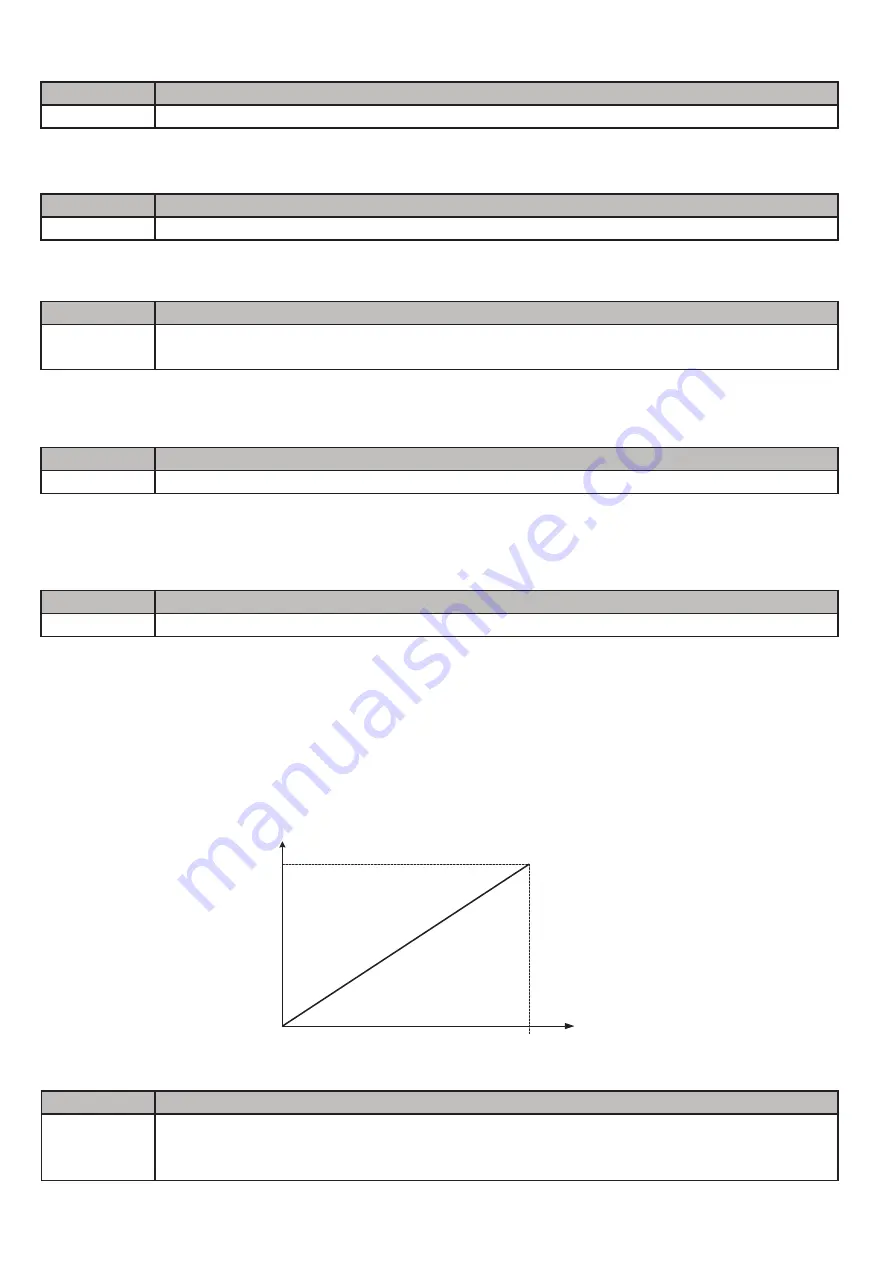
PID Feedback Display Scaling
The PID feedback signal can be scaled to represent actual engineering units.
Example:
Feedback signal is a pressure transducer (0-10V or 4-20mA ) with a range of 0 – 20.0 PSI
4mA (0V) = 0 PSI, 20mA (10V) = 20.0 PSI. Set parameter 10-27 to 20.
Refer to the figure below for displaying the unit conversion.
Feedback
Signal
10V
( 20mA )
0V
( 4mA )
10-27
Display unit
10-29
PID sleep selection Default: 1
Range
【
0
】
: Disabled
【
1
】
: Enabled
【
2
】
: Set by DI
10-25
PID reversal output selection Default: 0
Range
【
0
】
: Do not allow the reversal output
【
1
】
: Allow the reversal output
In case the PID control output value goes negative, parameter 10-25 (PID reversal output selection) can be used to
reverse the motor direction.
10-26
PID target acceleration / deceleration time Default: 0
Range
【
0.0–25.5
】
Sec
Sets the PID target value acceleration and deceleration ramp time. The acceleration/deceleration time is set by 00-14
to 00-17 and 00-21 to 00-24. Reduce the acceleration/deceleration time if load resonance or system instability is
encountered.
10-24
PID output gain Default: 1
Range
【
0.0–25.0
】
Use parameter 10-24 to adjust PID output.
10-23
PID limit Default: 100
Range
【
0.0–100.0
】
%
Sets the PID output limit. Maximum output frequency is 100%.