





























Chapter 12 Troubleshooting
11
For example: The master axis position is 100 and
ActivationPosition
1000 at the time when the
MC_CamIn
instruction execution starts. The master axis position is 1000 (1000=
ActivationPosition
)
as the actual engagement begins.
Slave a xis p osit io n
Mas ter ax is p osition
MC_CamI n Ex ecut ion Proc es s
1
2
3
4
5
6
10 0
1000
A ct iv at io nPos ition Abs olut e ax is pos ition
:
Stage 1:
Trigger and execute the MC_CamIn instruction. The master axis absolute position is
100 at the moment.
Stage 2:
Wait for the start of the engagement.
Stage 3:
The master axis reaches the position for starting the engagement (1000) and the slave
axis starts to perform the engagement action.
Stage 4:
The engagement is being conducted.
Stage 5:
The engagement is completed and the master axis and slave axis achieve the
synchronization.
Stage 6:
The master axis and slave axis are in the synchronous motion.
ActivationPosition: Absolute axis phase
When
ActivationMode
=2,
ActivationPosition
is an absolute axis phase which is the remainder got
by dividing the axis absolute position by modulo. The slave axis starts to perform the engagement
action as the master axis absolute phase is
ActivationPosition
.
The absolute axis phase is cyclic. Its absolute axis phase may be equal to
ActivationPosition
many
times in the motion of the master axis. But the slave axis starts to perform the engagement action
only when the absolute axis phase of the master axis is equal to
ActivationPosition
for the first time
after the MC_CamIn instruction is executed.
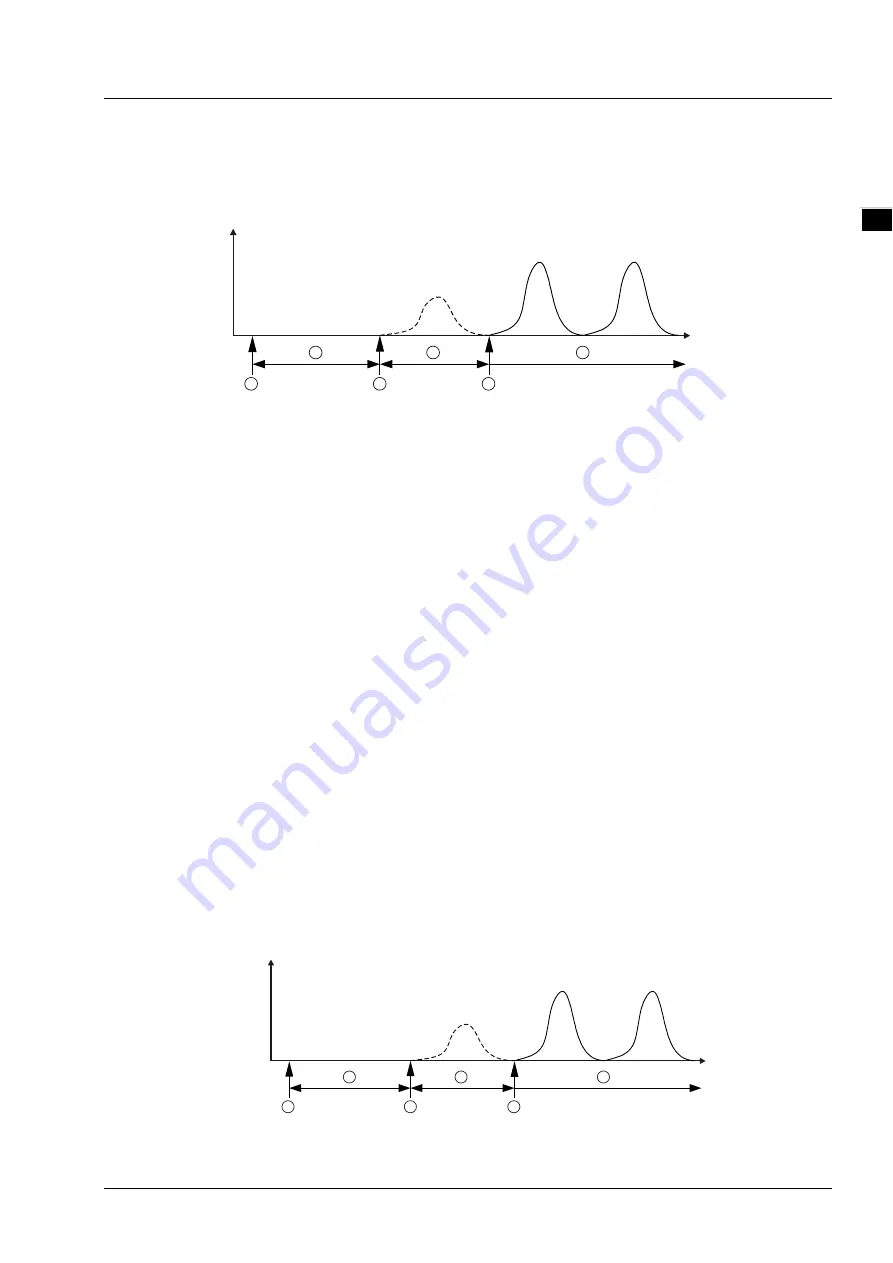
For example, the master axis modulo is 400,
ActivationPosition
=100 and the master axis position
is 1000 at the time when the
MC_CamIn
instruction is executed. The slave axis will not perform the
engagement action because the absolute axis phase of the master axis is 200 (200=1000%400) at
the time when the
MC_CamIn
instruction is executed. The slave axis starts to perform the
engagement action as the master axis position is 1300 (Absolute axis phase is 100=1300%400) or
900 (Absolute axis phase is 100=900%400). (% means the mathematic operation to find the
remainder)
S lave a xis p osition
Mas ter ax is po sition
MC_CamI n Ex ecu tion Proc es s
1
2
3
4
5
6
10 00
1300
Ac tiva tionPo sition A bs olu te axis phas e
:
C
a se 1
11-155
Содержание DVP15MC11T
Страница 9: ...Memo viii...
Страница 15: ...DVP15MC11T Operation Manual _2 MEMO 2 4...
Страница 71: ...DVP15MC11T Operation Manual _7 Memo 7 10...
Страница 81: ...DVP15MC11T Operation Manual _8 Timing Chart F_TRG_CLK F_TRG_Q 8 10...
Страница 158: ...Chapter 8 Logic Instructions 8_ The program 1 ASIN EN ENO In Out ASIN_EN ASIN_In Out1 8 87...
Страница 213: ...DVP15MC11T Operation Manual _8 The program 1 LIMIT EN ENO MN Out MX In LIMIT_EN LIMIT_MN LIMIT_MX LIMIT_In Out1 8 142...
Страница 216: ...Chapter 8 Logic Instructions 8_ The program 1 BAND EN ENO MN Out MX In BAND_EN BAND_MN BAND_MX BAND_In Out1 8 145...
Страница 249: ...DVP15MC11T Operation Manual _8 8 178...
Страница 285: ...DVP15MC11T Operation Manual _8 Memo 8 214...
Страница 286: ...9 Chapter 9 Introductions of Axis Parameters Table of Contents 9 1 Description of Axis Parameters 9 2 9 1...
Страница 323: ...DVP15MC11T Operation Manual 10 MEMO 10 34...
Страница 549: ...DVP15MC11T Operation Manual A MEMO A 16...
Страница 571: ...DVP15MC11T Operation Manual C Memo C 10...
Страница 572: ...D Appendix D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2 D 1...







































































