





























DVP15MC11T Operation Manual
11
1
Parameter
name
Function
Data type
Valid range
ErrorID
Contains the error code when an error occurs. Please
refer to section 12.2 for the corresponding error ID.
WORD
Output Update Timing
Parameter Name
Timing for changing to TRUE
Timing for changing to FALSE
Status
When the axis is enabled.
When
Enable
changes to FALSE.
When
Error
changes to TRUE.
Busy
When the instruction is being
executed.
When
Error
changes to TRUE.
Active
The instruction starts controlling
the axis.
When
Error
changes to TRUE.
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
illegal.
When an abnormal situation is
cleared.
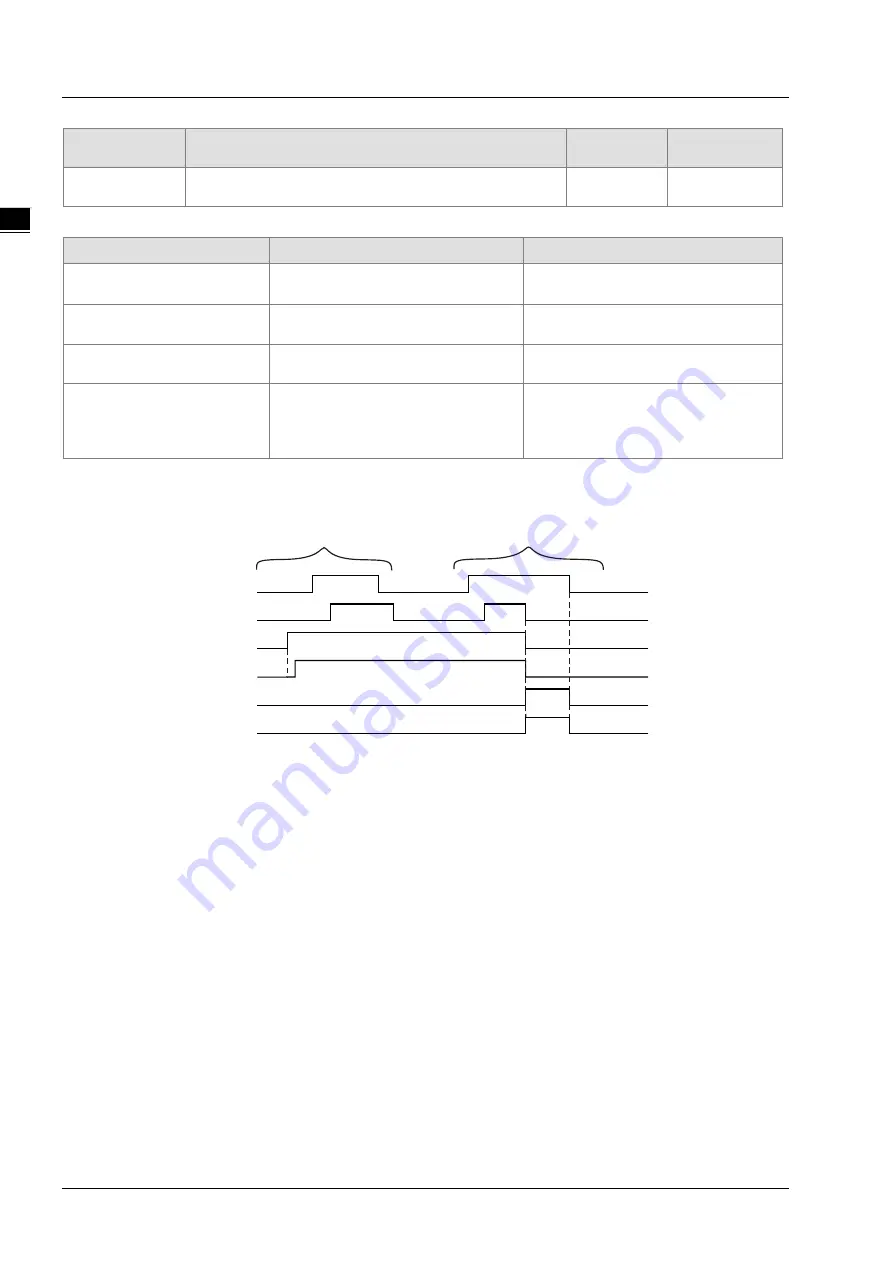
Output Update Timing Chart
Case 1
:
When MC_Power instruction is executed for the first time,
Busy
changes to TRUE and one
cycle later,
Active
changes to TRUE. After
Enable
changes from FALSE to TRUE and the axis
is enabled,
Status
changes to TRUE. After
Enable
changes from TRUE to FALSE and the axis
is disabled,
Status
changes from TRUE to FALSE.
Case 2
:
When an error occurs in the execution of the instruction,
Error
changes to TRUE, the
corresponding error code is contained in
ErrorID
and meanwhile
Status
,
Busy
and
Active
all
change to FALSE.
Error
changes to FALSE when the error is cleared.
Function
This instruction is used to enable or disable the corresponding servo axis.
1.
Status
will not change to TRUE if the axis is not enabled yet after
Enable
is set to TRUE. Please
make sure that
Status
has already changed to TRUE before the axis is started to move.
2.
When
Enable
and
EnablePositive
are both TRUE, the axis specified by a motion instruction is
allowed to move in the positive direction.
3.
When
Enable
is TRUE and
EnablePositive
is FALSE, the axis specified by a motion instruction
is
prohibited to move in the positive direction. In this case, there will be an error in existence if some
motion instruction is used to move the axis forward. If the axis moves from forward to backward, the
instruction which is controlling the motion of the axis will be aborted and the axis will stop moving
and enter the state of Standstill.
4.
When
Enable
and
EnableNegative
are both TRUE, the axis specified by a motion instruction can
move
in the negative direction.
En able
St atus
B usy
Ac tiv e
Error
Cas e 1
E rro r ID
Cas e 2
11-6
Содержание DVP15MC11T
Страница 9: ...Memo viii...
Страница 15: ...DVP15MC11T Operation Manual _2 MEMO 2 4...
Страница 71: ...DVP15MC11T Operation Manual _7 Memo 7 10...
Страница 81: ...DVP15MC11T Operation Manual _8 Timing Chart F_TRG_CLK F_TRG_Q 8 10...
Страница 158: ...Chapter 8 Logic Instructions 8_ The program 1 ASIN EN ENO In Out ASIN_EN ASIN_In Out1 8 87...
Страница 213: ...DVP15MC11T Operation Manual _8 The program 1 LIMIT EN ENO MN Out MX In LIMIT_EN LIMIT_MN LIMIT_MX LIMIT_In Out1 8 142...
Страница 216: ...Chapter 8 Logic Instructions 8_ The program 1 BAND EN ENO MN Out MX In BAND_EN BAND_MN BAND_MX BAND_In Out1 8 145...
Страница 249: ...DVP15MC11T Operation Manual _8 8 178...
Страница 285: ...DVP15MC11T Operation Manual _8 Memo 8 214...
Страница 286: ...9 Chapter 9 Introductions of Axis Parameters Table of Contents 9 1 Description of Axis Parameters 9 2 9 1...
Страница 323: ...DVP15MC11T Operation Manual 10 MEMO 10 34...
Страница 549: ...DVP15MC11T Operation Manual A MEMO A 16...
Страница 571: ...DVP15MC11T Operation Manual C Memo C 10...
Страница 572: ...D Appendix D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2 D 1...







































































