





























Chapter 7 Introduction of Axis Parameters
7_
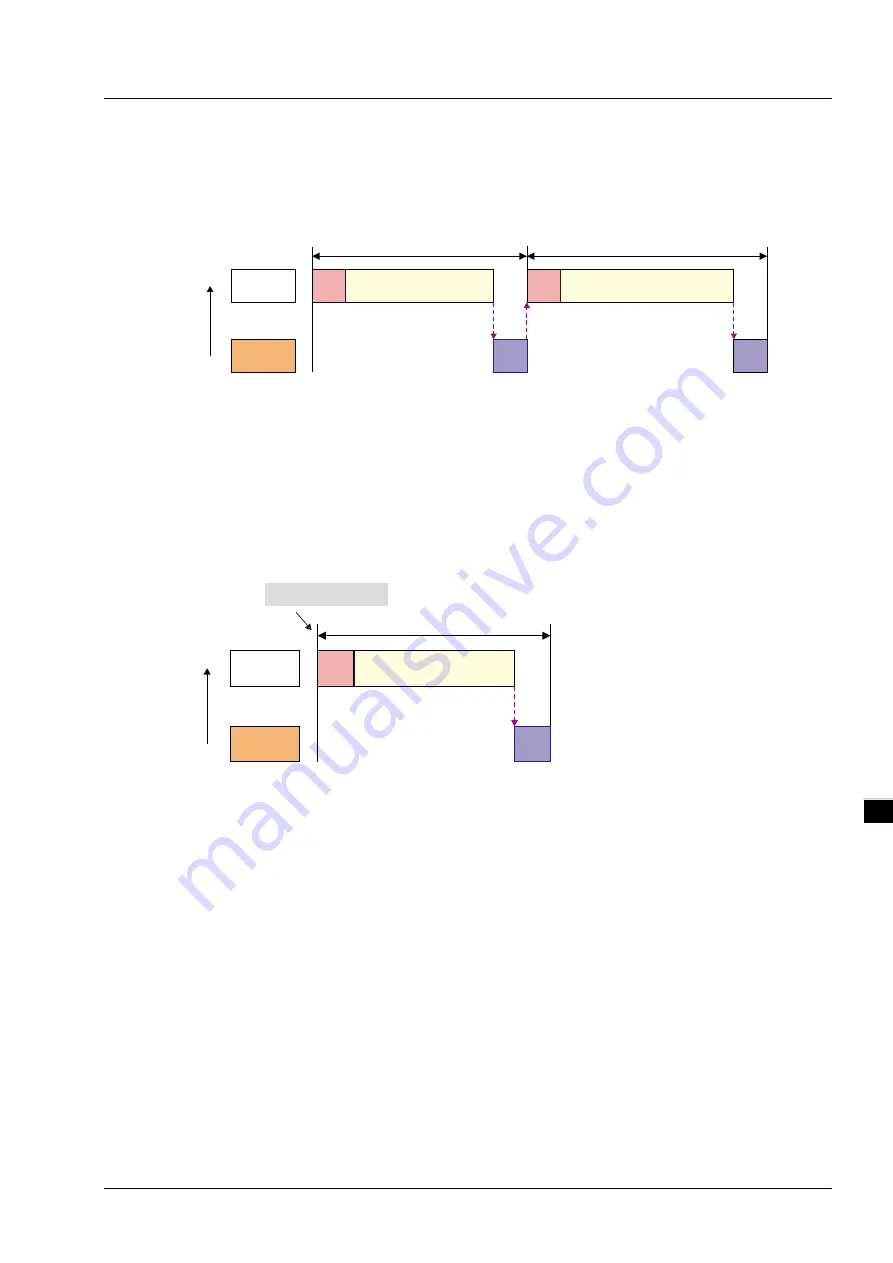
Freewheeling task
Freewheeling task
:
The task will be handled as soon as the program running starts. The task will be
restarted automatically in the next cycle after one execution cycle ends.
The way a freewheeling task is executed
I O
Use r program
Tas k exe cut io n t ime 1
F ree wh e eli ng
t as k
P riorit y
Hig h
Low
Syst em
p ro cessing
I O
Us er prog ram
Task e xec ution time 2
Syst em
p ro cessing
System
pr ocessin g
Note:
There is no fixed execution time for the freewheeling task. So the values of task execution time
1 and task execution time 2 may not be equal in the above figure.
Task triggered by event
Event task
:
An event task is executed once just when the specified event happens. The timing for
execution of an event task depends on the timing for occurring of the event and the priority level of the
event task.
The way an event task is executed
I O
User program
Tas k exe cut ion t ime
Tas k t rig g ered
by ev en t
Sy st em
process ing
P riorit y
High
L ow
Sy st em
pr ocess ing
Tas k ex ec ution
c ondit ion met
The event tasks for option contain following few types.
-
Motion event (Motion control task)
-
Rising edge or falling edge of local input points (I0~I7 and I10~I17)
-
CANopen SYNC signal
-
Z pulse rising edge of incremental encoder 1 or encoder 2
The condition for the second-time execution is ignored when the condition required for execution of the
event task is met again before the event task is completed. The period before an event task is completed
is the course while the event task is being executed or is waiting to be executed.
Motion Event
Motion port of the controller sends out SYNC signal and the task is triggered.
Note:
The motion task is set to priority 1 by default. The priority level can be modified. However, make
sure that there is enough time for execution of the motion task within CANopen SYNC period.
SYNC cycle setting should meet following conditions.
There must be enough time for execution of the program defined in a motion task.
There must be sufficient time for PDO and SDO data exchange between the controller and servo
drive.
7-3
Содержание DVP15MC11T
Страница 9: ...Memo viii...
Страница 15: ...DVP15MC11T Operation Manual _2 MEMO 2 4...
Страница 71: ...DVP15MC11T Operation Manual _7 Memo 7 10...
Страница 81: ...DVP15MC11T Operation Manual _8 Timing Chart F_TRG_CLK F_TRG_Q 8 10...
Страница 158: ...Chapter 8 Logic Instructions 8_ The program 1 ASIN EN ENO In Out ASIN_EN ASIN_In Out1 8 87...
Страница 213: ...DVP15MC11T Operation Manual _8 The program 1 LIMIT EN ENO MN Out MX In LIMIT_EN LIMIT_MN LIMIT_MX LIMIT_In Out1 8 142...
Страница 216: ...Chapter 8 Logic Instructions 8_ The program 1 BAND EN ENO MN Out MX In BAND_EN BAND_MN BAND_MX BAND_In Out1 8 145...
Страница 249: ...DVP15MC11T Operation Manual _8 8 178...
Страница 285: ...DVP15MC11T Operation Manual _8 Memo 8 214...
Страница 286: ...9 Chapter 9 Introductions of Axis Parameters Table of Contents 9 1 Description of Axis Parameters 9 2 9 1...
Страница 323: ...DVP15MC11T Operation Manual 10 MEMO 10 34...
Страница 549: ...DVP15MC11T Operation Manual A MEMO A 16...
Страница 571: ...DVP15MC11T Operation Manual C Memo C 10...
Страница 572: ...D Appendix D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2 D 1...







































































