





























DVP15MC11T Operation Manual
11
1
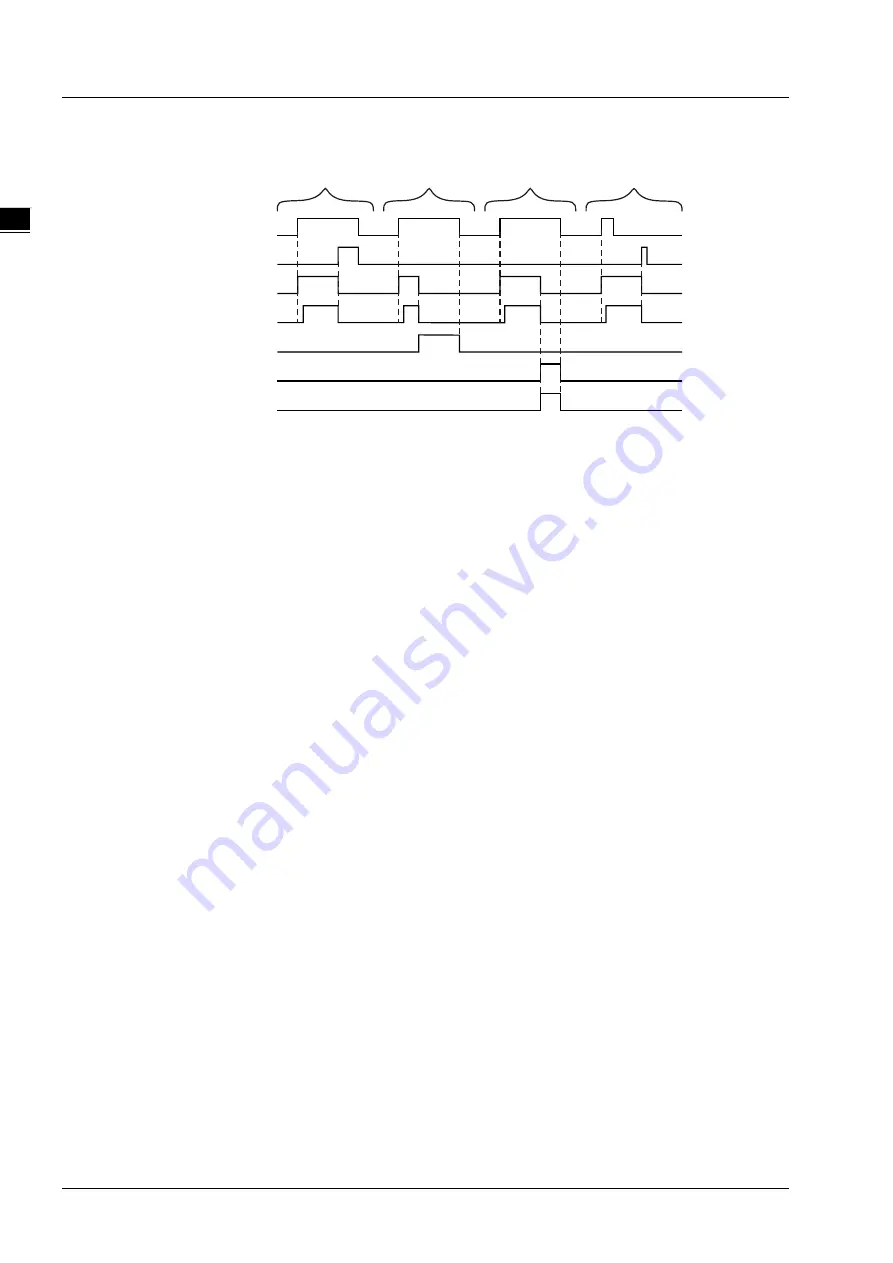
Output Update Timing Chart
Case 1
:
When
Execute
changes from FALSE to TRUE,
Busy
changes to TRUE and one period
later,
Active
changes to TRUE. When positioning is finished,
Done
changes to TRUE and
meanwhile,
Busy
and
Active
change to FALSE.
Case 2
:
When
Execute
changes from FALSE to TRUE and the instruction execution is aborted by
some other instruction,
CommandAborted
changes to TRUE and meanwhile,
Busy
and
Active
change to FALSE. When
Execute
changes from TRUE to FALSE,
CommandAborted
changes to FALSE.
Case 3
:
When
Execute
changes from FALSE to TRUE and an error occurs such as axis alarm or
Offline,
Error
changes to TRUE and
ErrorID
shows corresponding error codes. Meanwhile,
Busy
and
Active
change to FALSE.
Error
changes to FALSE when
Execute
changes from
TRUE to FALSE.
Case 4
:
In the course of execution of the instruction,
Done
changes to TRUE when the instruction
execution is completed after
Execute
changes from TRUE to FALSE. Meanwhile,
Busy
and
Active
change to FALSE and one period later,
Done
changes to FALSE.
Function
MC_MoveAdditive can control the actuator to move an additive distance at a given speed and
acceleration.
The execution of the former instruction related with positioning has not been finished yet and the
distance which the terminal actuator will move includes the uncompleted distance left by the former
instruction and the given distance of this instruction when MC_MoveAdditive is executed. When the
execution of MC_MoveAdditive is completed, the final position of the terminal actuator is the sum of the
given distances of the former instruction and current instruction MC_MoveAdditive.
If the former instruction is a velocity instruction, MC_MoveAdditive will abort the execution of the
velocity instruction and the terminal actuator will stop after moving a given distance of
MC_MoveAdditive at a given speed, acceleration and deceleration.
If MC_MoveAdditive is executed while MC_MoveSuperimposed is individually executed, the instruction
will abort MC_MoveSuperimposed immediately when the value of
BufferMode
of MC_MoveAdditive is 0.
The distance which the terminal actuator will move includes the set distance of this instruction and the
uncompleted distance left by MC_MoveSuperimposed while MC_MoveAdditive is executed.
An error will occur in the instruction right away if the value of
BufferMode
is in the range of 1~5 and the
execution of MC_MoveSuperimposed instruction will continue.
If MC_MoveAdditive is executed when MC_MoveSuperimposed is used with a positioning instruction
together, the instruction will abort MC_MoveSuperimposed and the positioning instruction when the
value of
BufferMode
of MC_MoveAdditive is 0. The distance which the terminal actuator will move is the
Ex ec ute
Done
B usy
Ac tive
Co mma ndAbo rt ed
Error
Case1
Case2
Case3
Case4
Error I D
11-46
Содержание DVP15MC11T
Страница 9: ...Memo viii...
Страница 15: ...DVP15MC11T Operation Manual _2 MEMO 2 4...
Страница 71: ...DVP15MC11T Operation Manual _7 Memo 7 10...
Страница 81: ...DVP15MC11T Operation Manual _8 Timing Chart F_TRG_CLK F_TRG_Q 8 10...
Страница 158: ...Chapter 8 Logic Instructions 8_ The program 1 ASIN EN ENO In Out ASIN_EN ASIN_In Out1 8 87...
Страница 213: ...DVP15MC11T Operation Manual _8 The program 1 LIMIT EN ENO MN Out MX In LIMIT_EN LIMIT_MN LIMIT_MX LIMIT_In Out1 8 142...
Страница 216: ...Chapter 8 Logic Instructions 8_ The program 1 BAND EN ENO MN Out MX In BAND_EN BAND_MN BAND_MX BAND_In Out1 8 145...
Страница 249: ...DVP15MC11T Operation Manual _8 8 178...
Страница 285: ...DVP15MC11T Operation Manual _8 Memo 8 214...
Страница 286: ...9 Chapter 9 Introductions of Axis Parameters Table of Contents 9 1 Description of Axis Parameters 9 2 9 1...
Страница 323: ...DVP15MC11T Operation Manual 10 MEMO 10 34...
Страница 549: ...DVP15MC11T Operation Manual A MEMO A 16...
Страница 571: ...DVP15MC11T Operation Manual C Memo C 10...
Страница 572: ...D Appendix D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2 D 1...







































































