





























DVP15MC11T Operation Manual
11
1
Output Update Timing
Parameter Name
Timing for changing to TRUE
Timing for changing to FALSE
Done
When absolute positioning is
completed
When
Execute
changes from TRUE to FALSE
after the instruction execution is done.
Done
changes to TRUE when the instruction
execution is completed after
Execute
changes
from TRUE to FALSE during the instruction
execution. One period later,
Done
changes to
FALSE.
Busy
When
Execute
changes to
TRUE.
When
Done
changes to TRUE.
When
Error
changes to TRUE.
When
CommandAborted
changes to TRUE.
Active
When the instruction starts
controlling the axis.
When
Done
changes to TRUE.
When
Error
changes to TRUE.
When
CommandAborted
changes to TRUE.
CommandAborted
When the instruction execution
is aborted by some other
motion control instruction.
When
Execute
changes from TRUE to FALSE.
CommandAborted
is set to TRUE when the
instruction execution is aborted after
Execute
changes from TRUE to FALSE during the
instruction execution. One period later,
CommandAborted
changes to FALSE.
Error
When an error occurs in the
instruction execution or the
input parameters for the
instruction are illegal.
When
Execute
changes from TRUE to FALSE
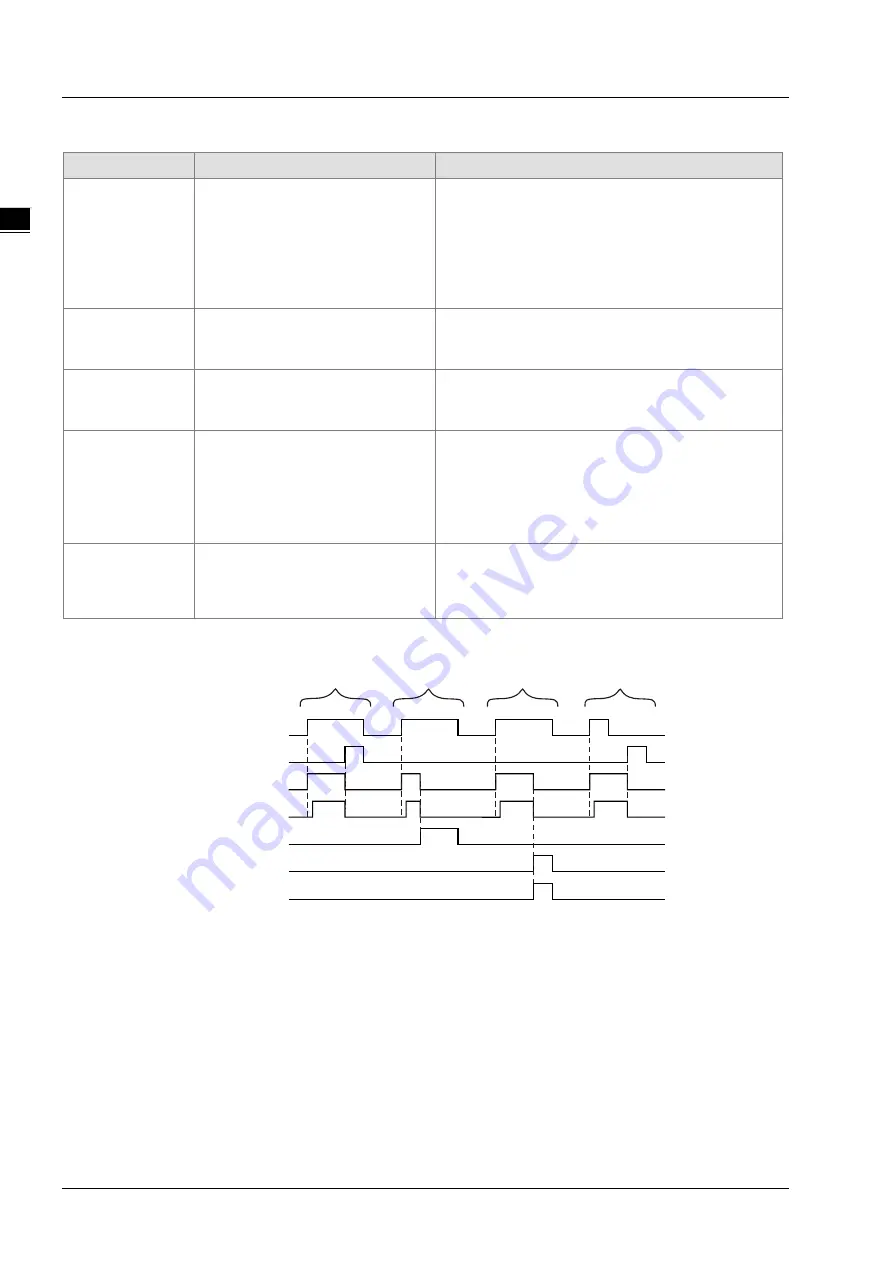
Output Update Timing Chart
Case 1
:
When
Execute
changes from FALSE to TRUE,
Busy
changes to TRUE and one period
later,
Active
changes to TRUE. When positioning is completed,
Done
changes to TRUE
and meanwhile, Busy and Active change to FALSE.
Case 2
:
When the instruction execution is aborted by some other motion instruction after
Execute
changes from FALSE to TRUE,
Abort
changes to TRUE and meanwhile,
Busy
and
Active
change to FALSE. When
Execute
changes from TRUE to FALSE,
CommandAborted
changes to FALSE.
Case 3
:
When
Execute
changes from FALSE to TRUE and an error occurs such as axis alarm or
Offline,
Error
changes to TRUE and
ErrorID
shows the corresponding error code. And
Meanwhile,
Busy
and
Active
change to FALSE.
Error
changes to FALSE when
Execute
changes from TRUE to FALSE.
Ex ec ute
Done
B usy
Ac tive
Co mma ndAbo rt ed
Error
E rro r ID
Cas e1
Cas e2
Case3
Cas e4
11-54
Содержание DVP15MC11T
Страница 9: ...Memo viii...
Страница 15: ...DVP15MC11T Operation Manual _2 MEMO 2 4...
Страница 71: ...DVP15MC11T Operation Manual _7 Memo 7 10...
Страница 81: ...DVP15MC11T Operation Manual _8 Timing Chart F_TRG_CLK F_TRG_Q 8 10...
Страница 158: ...Chapter 8 Logic Instructions 8_ The program 1 ASIN EN ENO In Out ASIN_EN ASIN_In Out1 8 87...
Страница 213: ...DVP15MC11T Operation Manual _8 The program 1 LIMIT EN ENO MN Out MX In LIMIT_EN LIMIT_MN LIMIT_MX LIMIT_In Out1 8 142...
Страница 216: ...Chapter 8 Logic Instructions 8_ The program 1 BAND EN ENO MN Out MX In BAND_EN BAND_MN BAND_MX BAND_In Out1 8 145...
Страница 249: ...DVP15MC11T Operation Manual _8 8 178...
Страница 285: ...DVP15MC11T Operation Manual _8 Memo 8 214...
Страница 286: ...9 Chapter 9 Introductions of Axis Parameters Table of Contents 9 1 Description of Axis Parameters 9 2 9 1...
Страница 323: ...DVP15MC11T Operation Manual 10 MEMO 10 34...
Страница 549: ...DVP15MC11T Operation Manual A MEMO A 16...
Страница 571: ...DVP15MC11T Operation Manual C Memo C 10...
Страница 572: ...D Appendix D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2 D 1...







































































