





























Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
411
Programming via Drive Parameters
Chapter 15
0x04
TSPD
Target Speed Reached
When the motor speed is faster than the target speed setting ID146 (P1.039) UpToSpeedLimit, this DO
is on.
Level triggered
All
0x05
TPOS
Target Position Reached
When the deviation pulse number is smaller than the position range setting value of ID159 (P1.054)
InPositionWindow, this DO is on.
Level triggered
PT, PR, I/O
(Position, Gear)
0x06
TQL
Torque Limit
When it is in torque limit, this DO is on.
Level triggered
All (Except for T
and Tz)
0x07
ALRM
Servo Warning
When an fault occurs, this DO is on. (Except for forward / reverse limit, communication error,
undervoltage, and fan error.)
Level triggered
All
0x08
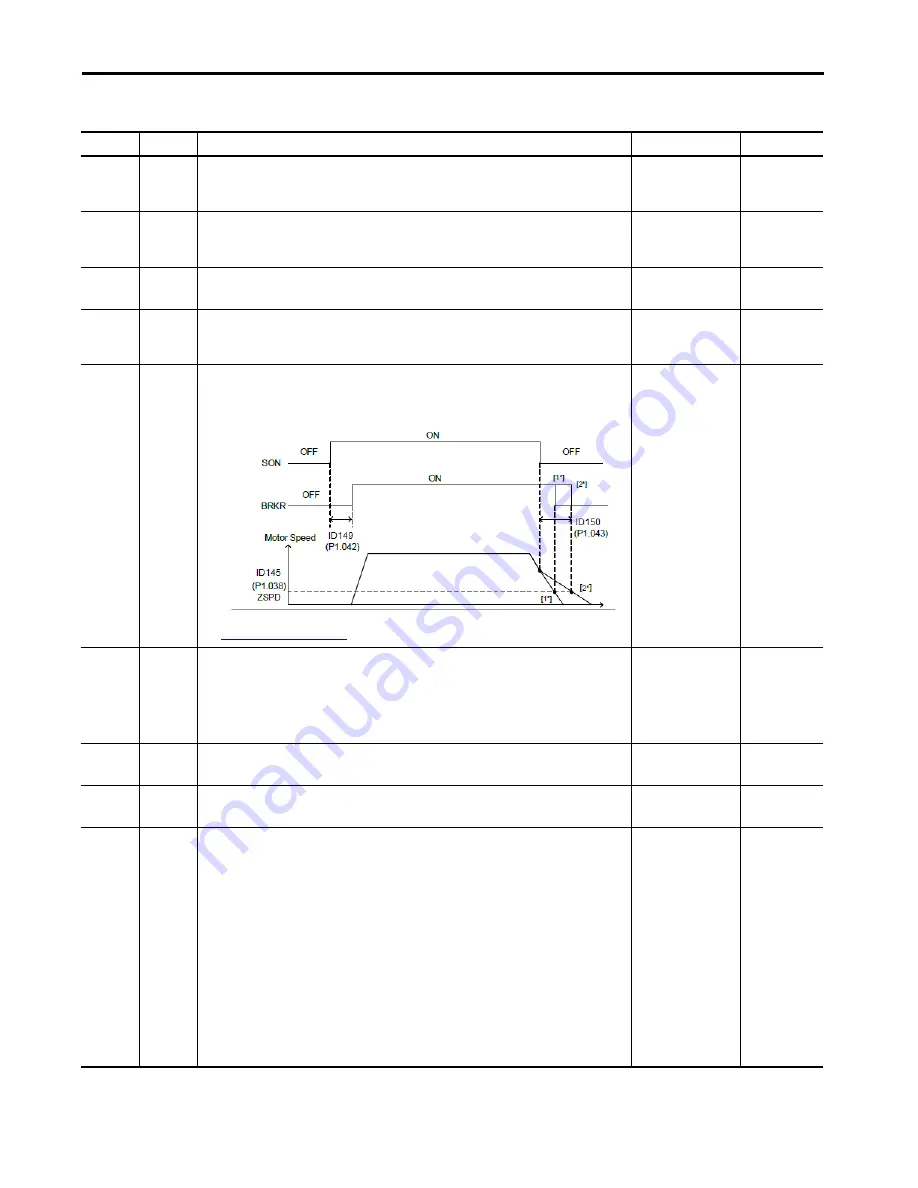
BRKR
Brake Control
When the signal of magnetic brake control is outputted, adjust the settings of ID149 (P1.042)
BrakeOnDelay and
ID150 (P1.043) BrakeOffDelay.
See
Motor Brake Circuit on page 58
.
Level triggered
All
0x09
HOME
Homing Completed
When homing is completed, it means the position coordinate system and position counter are defined
and this DO is on. When applying to power, this DO is off; when homing is completed, this DO is on.
During operation, this DO is on until the position counter overflows (including command or feedback).
Then, this DO turns off. When homing command is triggered, this DO is off; after homing is completed,
this DO is on.
Level triggered
PR
0x0D
ABSW
Absolute Type System Error
When there are faults regarding the absolute encoder, this DO is on.
Level triggered
All
0x0E
IDXD
Definition of Index Coordinates
Indexing coordinate is defined. When homing is completed, indexing coordinate is defined as well.
—
PR
0x10
OLW
Early Warning for Overload
This DO is on when the overload level setting is reached.
t
OL
= Overload allowable time of the servo x Setting of overload warning level ID161 (P1.056)
OverloadWarningUserThreshold. When the overload accumulative time exceeds t
OL
, it will output
overload pre-warning (OLW). However, if the overload accumulative time exceeds the overload
allowable time of the servo, it will output overload error (ALRM).
For example: The setting value of overload pre-warning is 60%. ID161 (P1.056)
OverloadWarningUserThreshold= 60.
When the output average load of the servo drive is 200% and the output-time exceeds 8 seconds, the
overload fault A 006 Motor overload will occur.
t
OL
= Duration of the output average load of the servo is 200% x Parameter setting of overload
warning level = 8 sec x 60% = 4.8 sec
Result: When the output average load of the servo drive is 200% for over t
OL
= 4.8 seconds, this
overload warning DO is on (DO code is set to 10). If the duration exceeds 8 seconds, then the overload
fault A 006 Motor overload occurs and will output overload error (ALRM).
Level triggered
All
Table 125 - Digital Outputs (Continued)
Setting
DO Name
DO Description
Triggering Method
Control Mode
Содержание Kinetix 5100 2198-E1004-ERS
Страница 114: ...114 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 6 Set Up EtherNet IP Communication Notes ...
Страница 402: ...402 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 14 Absolute Position Recovery Notes ...
Страница 484: ...484 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix C Use Add On Instructions Notes ...
Страница 488: ...488 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix D Full Closed Loop Control Notes ...
Страница 499: ......