





























336
Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
Chapter 12
Motion Control Applications
• Z: engaging time
0: immediately
1: trigger DI.CAM
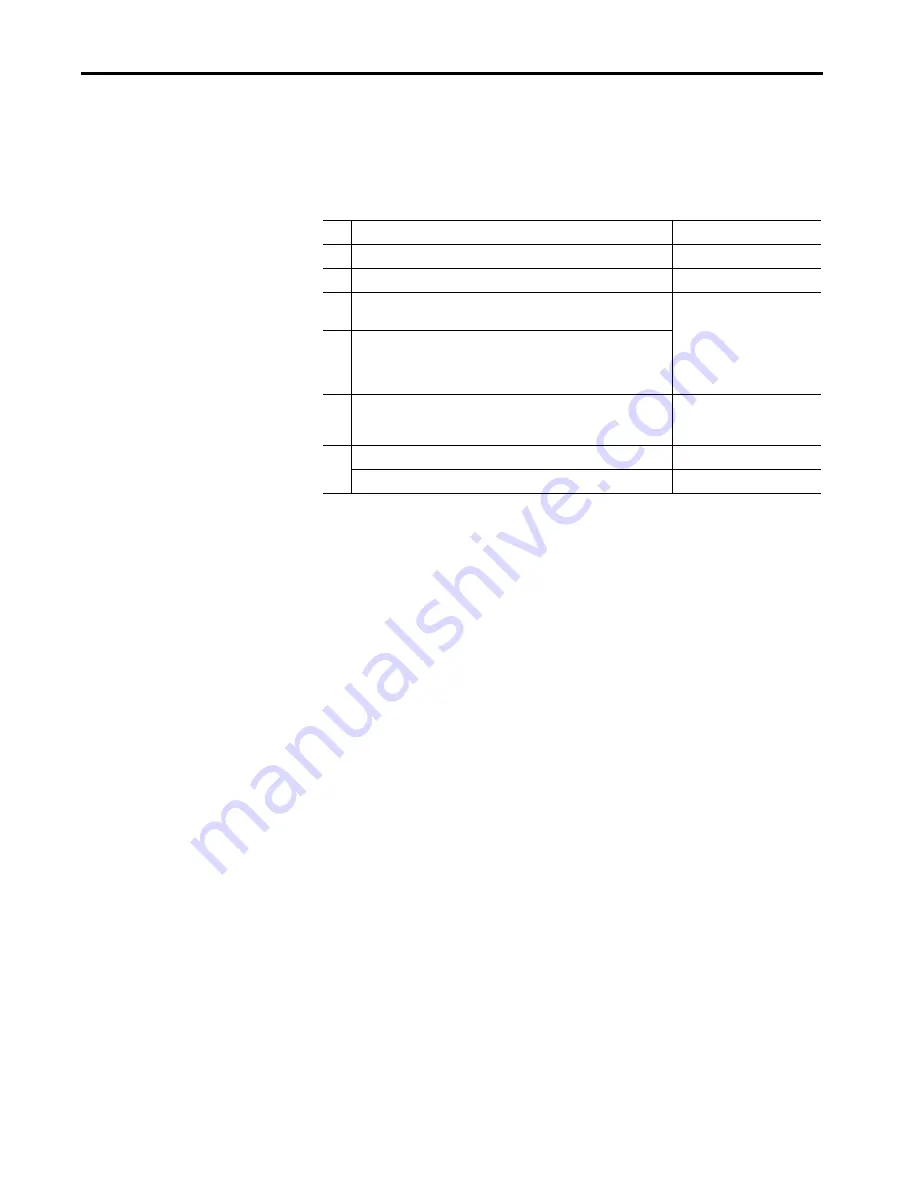
• U: disengaging condition (2, 4, and 6 cannot be selected at the same time)
• BA: auto execute the specified PR command
When disengaging condition (ID376 (P5.088.U: 2, 4, 6)) is met, a PR
00…3F (hexadecimal; 00 means no action) is executed automatically.
• C: reserved
• D: display engage status (Read-only)
0: stop status
1: engage status
2: pre-engage status
Master Axis Signal Source
When using an electronic cam, you must first determine the source of the master
axis, which can be an encoder, a host controller, a servo drive, and so on. The
Kinetix 5100 drive provides three signal sources for master axis as follows. The
signal source is determined by parameter ID376 (P5.088.Y) ECamControl. The
master axis position can be observed by parameter ID374 (P5.086).
• Auxiliary Encoder - when ID376 (P5.088
.Y)
= 1, the external encoder
signal from the motor feedback connector (MFB) is used as the source of
the master axis signal. And the master axis position can be obtained by
reading ID309 (P5.017) AuxEncoderPosition.
• Pulse Input - when ID376 (P5.088
.Y)
= 2, the pulse input from the I/O
connector is used as the source of the master axis signal. And the master
axis position can be obtained by reading ID310 (P5.018)
PulseCmdPosition.
• Time Axis (1ms) - when ID376 (P5.088
.Y)
= 4, the 1ms pulse generated
internally by the servo drive is used as the source of the master axis signal.
U
Disengagement condition
Action after disengaged
0
Never disengage
-
1
DI.CAM OFF
In stop status
2
Master axis reaches the setting value of P5.089 (Sign indicates the
direction)
In stop status
6
Same as 2, but the speed remains when disengaging and the engaged
length slightly exceeds ID377 (P5.089) ECamMasterPositionToDisengage.
This is suitable for when calling the next PR Position command right after
disengaging.
4
Master axis exceeds the value of ID377 (P5.089) (sign indicates the
direction)
Return to pre-engaged status
Lead pulse is ID380 (P5.092)
ECamSkippedMasterPulses
8
When U = 1, 2, or 6: disable E-Cam after disengaging
Set X to 0
When U = 4: Avoid jittering when it returns to pre-enagaged status
N/A
Содержание Kinetix 5100 2198-E1004-ERS
Страница 114: ...114 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 6 Set Up EtherNet IP Communication Notes ...
Страница 402: ...402 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 14 Absolute Position Recovery Notes ...
Страница 484: ...484 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix C Use Add On Instructions Notes ...
Страница 488: ...488 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix D Full Closed Loop Control Notes ...
Страница 499: ......