





























70
Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
Chapter 3
Connector Data and Feature Descriptions
Operation Modes
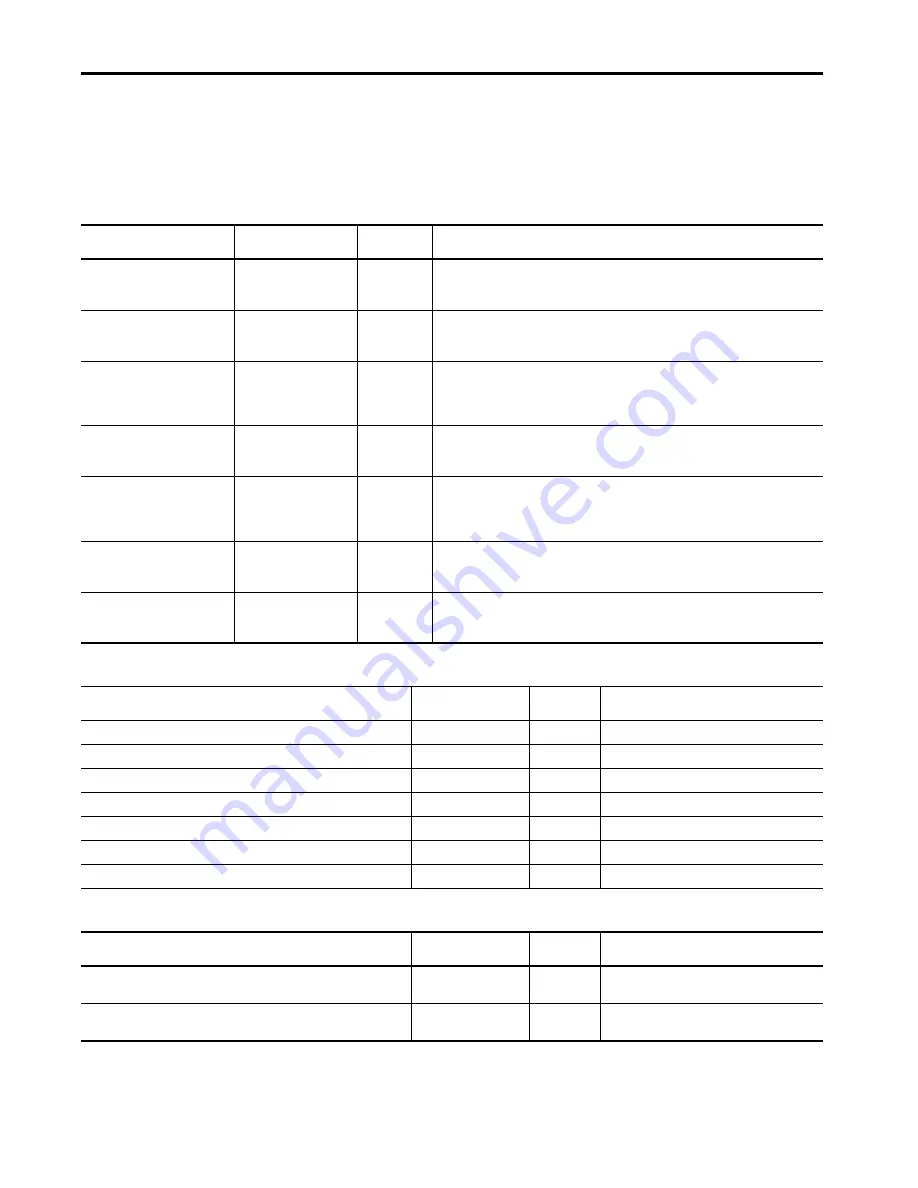
The Kinetix 5100 servo drive supports three basic modes of operation: Position,
Speed, and Torque. The communication mode is EtherNet/IP™. For basic
operation, you can choose from Single mode, Dual mode, and Multi mode. The
following table lists all the available modes.
Table 41 - Single Mode
Table 42 - Dual Mode
Table 43 - Multi Mode
Mode
Mode Abbreviation
Code
Description
Position mode
(terminal block input)
PT
00
This mode is sometimes referred to as Pulse Train Output or Step & Direction. The servo drive
receives the Position command and commands the motor to run to the target position. The
Position command is communicated through the terminal block and the signal type is pulse.
Position mode
(register input)
PR
01
The servo drive receives the Position command and commands the motor to run to the target
position. Position commands are issued from the program registers (99 sets in total). You can
select the register number with binary-weighted DI signals or through communication.
Speed mode
S
02
The servo drive receives the Speed command and commands the motor to run at the target
speed. The Speed command is issued from the internal registers (3 sets in total) or by analog
voltage (-10V…+10V) that is communicated through the terminal block. You can select the
command with binary-weighted DI signals.
Speed mode
(no analog input)
Sz
04
The servo drive receives the Speed command and commands the motor to run at the target
speed. The Speed command can only be issued from the internal registers (3 sets in total).
You can select the command with binary-weighted DI signals.
Torque mode
T
03
The servo drive receives the Torque command and commands the motor to run with the
target torque. The Torque commands can be issued from the internal registers (3 sets in
total) and by analog voltage (-10V…+10V) that is communicated through the terminal
block. You can select the command with binary-weighted DI signals.
Torque mode
(no analog input)
Tz
05
The servo drive receives the Torque command and commands the motor to run with the
target torque. The Torque command can only be issued from the internal registers (3 sets in
total). You can select the command with binary-weighted DI signals.
IO mode
IO
OC
The servo drive receives commands from the Logix controller through the EtherNet/IP
network connection. Commands are issued through the Add-On Instruction instructions in
the Logix Designer application.
Mode
Mode Abbreviation
Code
Description
Position mode PT (terminal block input) and Speed mode
PT-S
06
Switches PT and S mode with DI signals.
Position mode PT (terminal block input) and Torque mode
PT-T
07
Switches PT and T mode with DI signals.
Position mode PR (register input) and Speed mode
PR-S
08
Switches PR and S mode with DI signals.
Position mode PR (register input) and Speed mode
PR-T
09
Switches PR and T mode with DI signals.
Speed mode and Torque mode
S-T
0A
Switches S and T mode with DI signals.
–
–
0B
Reserved
Position mode PT (terminal block input) and Position mode PR (register input) PT-PR
0D
Switches PT and PR mode with DI signals.
Mode
Mode Abbreviation
Code
Description
Position mode PT (terminal block input), Position mode PR (register input),
and Speed mode
PT-PR-S
0E
Switches PT, PR, and S mode with DI signals.
Position mode PT (terminal block input), Position mode PR (register input),
and Torque mode
PT-PR-T
0F
Switches PT, PR, and T mode with DI signals.
Содержание Kinetix 5100 2198-E1004-ERS
Страница 114: ...114 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 6 Set Up EtherNet IP Communication Notes ...
Страница 402: ...402 Rockwell Automation Publication 2198 UM004A EN P October 2019 Chapter 14 Absolute Position Recovery Notes ...
Страница 484: ...484 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix C Use Add On Instructions Notes ...
Страница 488: ...488 Rockwell Automation Publication 2198 UM004A EN P October 2019 Appendix D Full Closed Loop Control Notes ...
Страница 499: ......