


























3.4
Type of application
There are two different types of application:
Control valve
and
On/off valve
. The auto-
matic mode
(AUTO) and manual mode
(MAN) can be selected in both types of
applications.
Operating
mode
Control valve
On/off valve
Automatic The positioner
follows the refer-
ence variable (w)
continuously.
Discrete analysis
of the reference
variable (w).
Reading
on dis-
play
Valve position x
in %
Valve position x
in % and
O/C
(Open/Close) in
alternating se-
quence
Manual
The positioner follows the manual
set point given over local operation.
The application type is set in Code
49 - h
(see section 7.8).
Note:
–
Depending on the application type, cer-
tain diagnostic functions cannot be per-
formed or analyzed. See Table 1.
–
Section 7.8 contains details on discrete
analysis of on/off valves.
–
In manual mode, an on/off valve can be
moved past 100 % of the nominal range
(with the closed position for ATO) or be-
low 0 % of the nominal range (with the
closed position for ATC). See section 7.1
for valve closed position.
3.5
Communication
The positioner is equipped with an interface
for HART
®
protocol (Highway Addressable
Remote Transducer) for communication pur-
poses. Data are transmitted in a superim-
posed frequency (FSK = Frequency Shift
Keying) on the existing signal loop for the 4
to 20 mA reference variable.
Either a HART
®
capable handheld commu-
nicator or a computer with FSK modem can
be used to establish communication and op-
erate the positioner.
3.5.1 Configuration using
TROVIS-VIEW 4
The positioner can be configured using the
TROVIS-VIEW 4 software for configuration
and operation. The positioner is equipped
for this purpose with an additional digital
SERIAL INTERFACE
to allow a computer to
be connected over an adapter cable from
the RS-232 or USB port of the computer to
the positioner.
The TROVIS-VIEW 4 software enables the
user to easily set parameters in the
positioner and view process parameters on-
line.
Note:
TROVIS-VIEW 4 is a free software
which can be downloaded from the
SAMSON website (
www.samson.de >
Services > Software > TROVIS-VIEW
).
12
EB 8384-6 EN
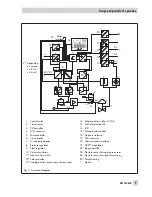
Design and principle of operation
Summary of Contents for 3730-6
Page 19: ...EB 8384 6 EN 19...
Page 51: ...EB 8384 6 EN 51...
Page 113: ...EB 8384 6 EN 113...
Page 114: ...114 EB 8384 6 EN...
Page 115: ...EB 8384 6 EN 115...
Page 116: ...116 EB 8384 6 EN...
Page 117: ...EB 8384 6 EN 117...
Page 118: ...118 EB 8384 6 EN...
Page 119: ...EB 8384 6 EN 119...
Page 120: ...120 EB 8384 6 EN...
Page 123: ...EB 8384 6 EN 123 diagnostic functions 11 Z Zero calibration 68 Index...





















































