





























Inspection and Protection Function
10-9
CSD7 Servo Drive (EtherCAT)
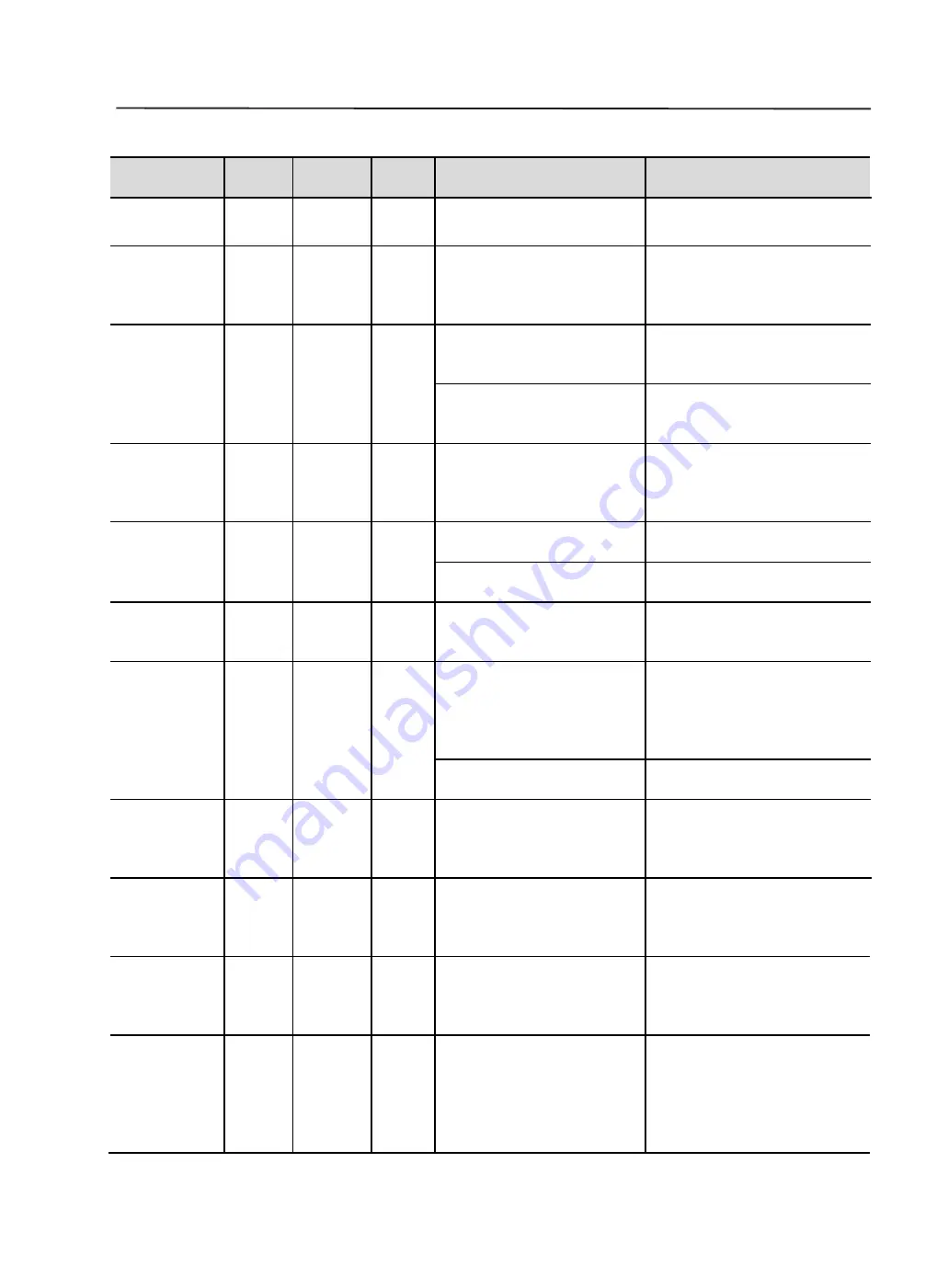
Fault Code
Text
Message
Error Code
for CiA402
Internal
Code
Possible Cause
Countermeasures
Check the values of the
regenerative resistor.
E.079
Regenerative
Over Current
Protection
E.SHtoC
0x2211
0x12
The regenerative current exceeds
the allowable instant value.
Check if the regenerative resistor is
shorted or damaged.
Check if the overload energy is
excessive while decelerating.
E.083
Low Battery Error
of Absolute
Encoder
E.AbSbE
0x6320
0x33
The parameter of the encoder
backup battery is set as ‘installed,’
but the battery is not installed.
Set the constant of the encoder
backup battery as ‘not installed.’
The battery voltage is detected
under 2.7 [V] DC.
Check the battery voltage and the
connections.
Replace the battery.
E.084
Absolute Encoder
Over Speed
E.AbSoS
0x7310
0x34
The encoder rotates mechanically
at high speed while the drive
power turns off, when it is
powered by the battery.
Remove the motor from the
system.
Turn off and on the drive and reset
the Warning.
E.085
Absolute Encoder
Multi-turn Count
Error
E.MtCEr
0x7300
0x35
Noise from Encoder
Turn off and on the drive and reset
the Warning.
Defective Encoder
Multi rotation data is abnormal
Replace the motor.
E.101
Motor Power
Cable Open
E.CAbLE
0x7122
0x20
The motor cable is not connected.
Check the power connection
between the motor and the drive.
E.102
Motor
instantaneous
current overload
E.InSoL
0x8331
0x21
The motion profile requires peak
current over 300% for a few
second.
Check the wiring of the motor.
Adjustthe cceleration/deceleration
time.
Check if the motor selected is
suitable.
There is a defect in the current
feedback detection.
Check the phase current of motor
E.103
Motor Mismatch
Fault
E.MAtCH
0x6320
0x28
The dynamic control current of the
selected motor exceeds double
the value of the drive peak current
rating.
Replace the motor with
appropriate motor.
E.106
Encoder
Communication
Error
E.EnCCE
0x7300
0x32
The wiring between the drive and
the encoder is cut off or
problematic. Or encoder signals
are interrupted by the EMI (noise).
Check the wiring of the encoder.
Contact your nearest dealer.
E.107
Serial
Communication
Error
E.SErCE
0x7510
0x60
Communication error between the
host and the drive (noise)
Check the serial communication
cable.
Check the noise of the serial
communication interface.
E.111
Safety Torque Off
Input Error
E.StoIn
0x7121
0x56
The Safety Torque Off input is
open. (Normal Close input
condition)
The signal was inputted by STO
input. Set the release condition.
Check the STO connection.
Check the connection of the
dummy connector provided with
the product.
Summary of Contents for OEMax CSD7
Page 1: ...CSD7 Servo Drive User Manual Catalog Number s CSD7_ BN F 1 EtherCAT Network type ...
Page 4: ......
Page 12: ...viii CSD7 Servo Drive EtherCAT SAFETY FUNCTION CONNECTOR B 6 ...
Page 23: ...Preface P 11 CSD7 Servo Drive EtherCAT ...
Page 24: ......
Page 33: ...Installation 2 5 CSD7 Servo Drive EtherCAT 100W 200W 400W 800W 1KW 1 5KW ...
Page 38: ......
Page 76: ......
Page 94: ......
Page 114: ......
Page 126: ......
Page 314: ......
Page 327: ...able and Connector Specification B 5 CSD7 Servo Drive EtherCAT ...
Page 330: ......
Page 331: ...Publication CSD7 UM001A Network EN October 2015 ...
Page 332: ...Copyright 2015 RS Automation Co Ltd All rights reserved ...