





























8-38 Tuning by Gain Setting
CSD7 Servo Drive (EtherCAT)
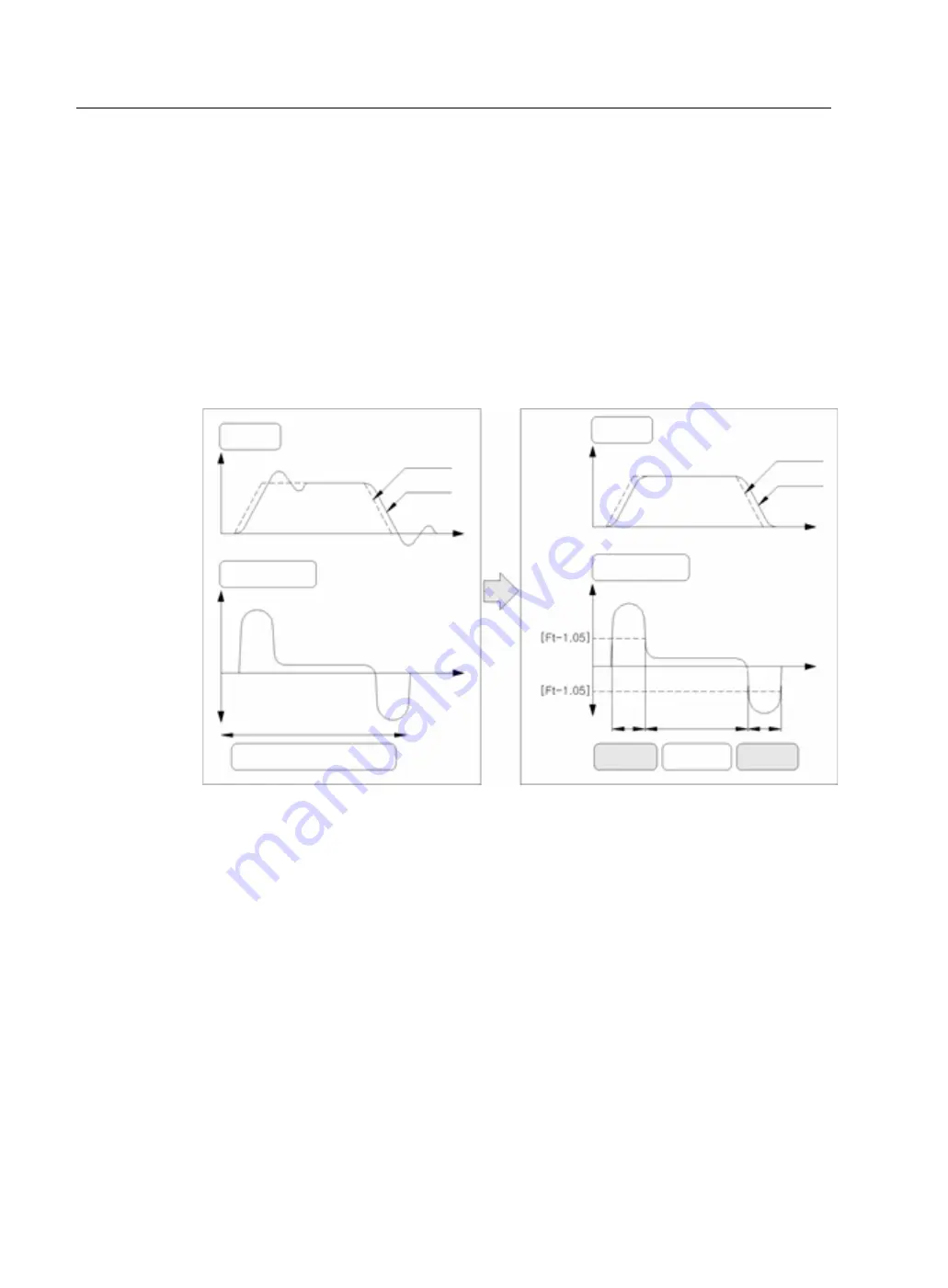
The following figure is example of velocity response when velocity
controller is converted from ‘PI controller’ to ‘P controller’ in the
transient response state.
In the transient response state of the acceleration-deceleration
section, if torque command is higher than setting value of 0x2105
(Ft-1.05), it becomes ‘P controller’ and the other section becomes ‘PI
controller’.
Velocity Command
Velocity
Feedback
Velocity
Velocity Command
Velocity
Feedback
Velocity
Torque
Command
Torque
Command
PI control
P control PI control P control
Summary of Contents for OEMax CSD7
Page 1: ...CSD7 Servo Drive User Manual Catalog Number s CSD7_ BN F 1 EtherCAT Network type ...
Page 4: ......
Page 12: ...viii CSD7 Servo Drive EtherCAT SAFETY FUNCTION CONNECTOR B 6 ...
Page 23: ...Preface P 11 CSD7 Servo Drive EtherCAT ...
Page 24: ......
Page 33: ...Installation 2 5 CSD7 Servo Drive EtherCAT 100W 200W 400W 800W 1KW 1 5KW ...
Page 38: ......
Page 76: ......
Page 94: ......
Page 114: ......
Page 126: ......
Page 314: ......
Page 327: ...able and Connector Specification B 5 CSD7 Servo Drive EtherCAT ...
Page 330: ......
Page 331: ...Publication CSD7 UM001A Network EN October 2015 ...
Page 332: ...Copyright 2015 RS Automation Co Ltd All rights reserved ...