





























30
4-1
MC Unit Data Configuration
The MC Unit handles three types of data: system parameters, position data, and
registers. Programs written in G language aren’t treated as data.
Data type
Function
System parameters
These parameters contain system information used in the
MC Unit, such as the number of axes used, number of tasks,
feed rate, and operating range.
Position data
There are 2,000 addresses that indicate position. In G
language, these are identified as A0000 through A1999.
Registers
Registers are used as pointers to position data. There are 32
registers, identified as E00 through E31 in G language.
When the parameters and position data set with the MC Support Software are
transferred to the MC Unit, they are stored in the system parameter and position
data areas.
The parameters and position data used in the MC Unit can be set very easily with
MC Support Software. Refer to the
MC Support Software Operation Manual
for
details.
Some of the position data and system parameters (acceleration/deceleration
time and interpolation acceleration/deceleration time) can be transferred to the
MC Unit using the PC data area interface. Refer to
4-3 Data Transmission and
Reception
for details.
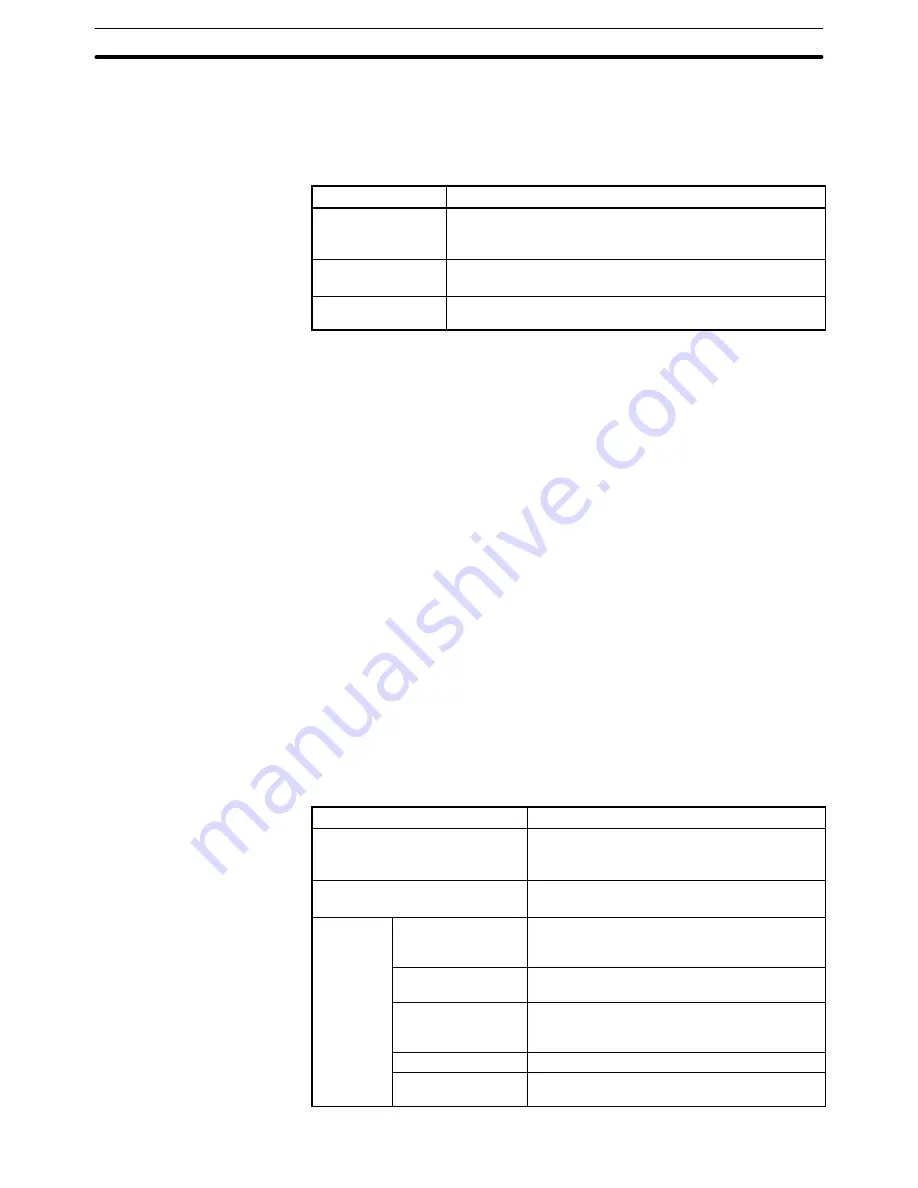
4-2
System Parameters
There are three types of system parameters: unit parameters, memory manage-
ment parameters, and axis parameters. The axis parameters are made up of 5
groups of parameters (mechanical parameters, coordinate system parameters,
feed-rate parameters, zone parameters, and servo parameters). The following
table describes the function of each parameter.
Parameter name
Function
Unit parameters
These parameters specify information inherent
to the Unit, such as the number of axes used
and the number of tasks.
Memory management parameter
Specifies the range of the position data for
teaching in each task.
Axis
parameters
(2 axes)
Mechanical
parameters
Specifies mechanical and electrical system
parameters such as the encoder resolution,
pulse rate, and operating range.
(
)
Coordinate system
parameters
Specifies the offset values for the reference
and workpiece coordinate systems.
Feed-rate
parameters
Specifies feed-rate information, such as the
maximum feed rate and maximum interpolation
feed rate.
Zone parameters
Specifies zone information.
Servo parameters
Specifies servo system information such as the
position loop gain and in-position.
System Parameters
Section 4-2
Summary of Contents for C200H-MC221 -
Page 1: ...Cat No W315 E1 03 Motion Control Unit C200H MC221 OPERATION MANUAL ...
Page 2: ......
Page 3: ...C200H MC221 Motion Control Unit Operation Manual Details Revised June 2010 ...
Page 4: ...iv ...
Page 6: ...vi ...
Page 10: ......
Page 12: ......
Page 16: ...xvi ...
Page 42: ......
Page 48: ......
Page 196: ......
Page 212: ......
Page 242: ......
Page 258: ......
Page 304: ......







































































