





























88
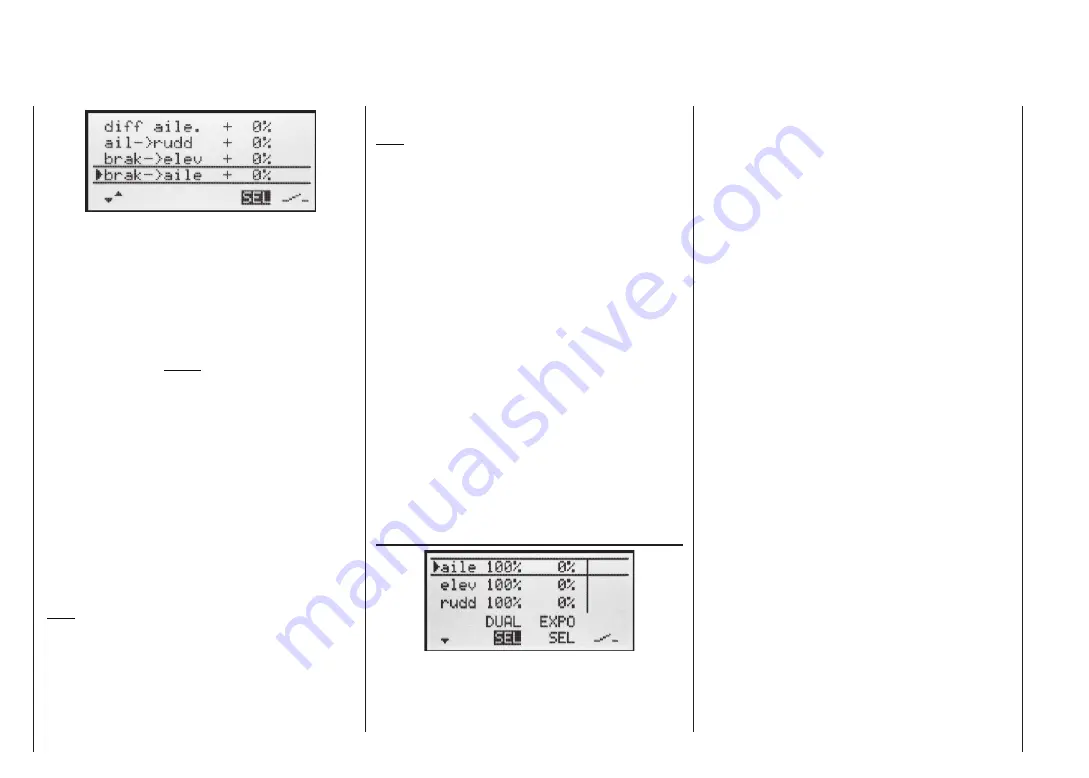
In principle the same applies to the “
Brake
fl ap
” line
if you have selected “2AIL 2FL”, although the set value
should ensure that the fl aps defl ect as far as possible in
the downward direction when the brake stick is opera-
ted. It is important to ensure that the servos do not strike
their mechanical end-stops.
If the ailerons are set up to act as simple brakes, or as
part of the braking arrangement in a butterfl y (crow) sys-
tem, then you should always enter a value for “
differen-
tial
reduction
” (see page 65) – setting 100% is the safe
option here!
Differential reduction means that aileron differential is
suppressed proportionally when you operate the airbra-
ke stick. The purpose of this is to increase the down-go-
ing aileron travel on the landing approach, with the aim
of improving
aileron response
.
If the wing is equipped with two camber-changing fl ap
servos in addition to two separately actuated aile-
rons, then the “
Aileron
fl ap
” mixer transfers the ai-
leron movements to the fl aps; we suggest that the fl aps
should not follow the movement of the ailerons to a gre-
ater extent than about 50%.
Note:
If you have only installed one fl ap servo, then leave this
mixer at 0%.
The “
Flap
aileron
” mixer works in the opposite direc-
tion; depending on the layout of the model we suggest
values between about 50% and 100% for this option.
The fl aps are controlled using the switch assigned to the
input “E6”, or the INC / DEC buttons (CTRL 5 and 6).
Note:
We strongly recommend that you reduce the travel of
the fl aps in the
»Control settings«
menu, as this gi-
ves fi ner control of the fl ap positions using the selected
transmitter control.
The remaining options in the »
Wing mixers
« menu are
designed to provide further fi ne-tuning of multi-fl ap wing
systems, and are largely self-explanatory.
When you have completed the model-specifi c settings
up to this point, you are probably ready to consider the
model’s fi rst fl ight. At this juncture you should certain-
ly take the time to carry out a series of “dry runs”, i.e.
check all the settings thoroughly while the model is still
on the ground. Remember that a serious programming
error may damage more than just the model. If you are
not sure of any point, ask an experienced model pilot for
advice.
If during the test phase you realise that one or other of
the settings needs to be changed in order to tailor the
model’s control response to your preferences – perhaps
the servo travels are too great or too small overall – then
we suggest that you turn to the following menu ...
»Dual Rate / Exponential«
(page 56)
... in order to adjust the overall set-up to suit your re-
quirements and fl ying style.
Dual Rates are used to adjust the magnitude of the
stick’s effect (see page 56). However, if it is only the
Programming examples: Fixed-wing model
model’s control response around neutral which is too po-
werful for comfortable fl ying, i.e. the maximum travels
are acceptable, then “Exponential” can be employed, eit-
her instead of Dual Rates or in addition to them. If a phy-
sical switch is assigned to this function, you can switch
between two Dual Rate / Expo settings while the model
is fl ying.
Summary of Contents for MX-16S
Page 1: ...1...
Page 17: ...17...
Page 31: ...31 Fixed wing models Installation and connections...
Page 35: ...35 Program description Reserving a new memory...
Page 47: ...47 Base settings Model helicopter...
Page 83: ...83 Fail safe...
Page 89: ...89 Programming examples Fixed wing model...
Page 109: ...109 Programming examples Model helicopter...
Page 112: ...112 112...
Page 116: ...116...







































































