





























90
Expanded programming: including an electric power system
An electric power system can be controlled in various
ways. The simplest method of including such a power
plant in a model program is to use the throttle / brake
stick (C1). However, in the preceding programming in-
structions we have already reserved the C1 transmitter
control for the airbrakes, which means that we have to
explore other possibilities for controlling the motor: one
is to use the switchable solution described in the section
starting on page 92, and another is to use an alternati-
ve transmitter control. A suitable option is the three-posi-
tion switch “SW 6/7”, and another is the rotary proporti-
onal control “CTRL 7”, located at top left of the transmit-
ter. (The two INC / DEC buttons – CTRL 5 and 6 – are
less suitable, as you would fi nd it diffi cult to cut the mo-
tor quickly enough in an emergency.) However, another
alternative would be one of the two-position switches.
The main reason for your choice ought to be that the
switch is within easy reach of your fi ngers, as this makes
it much easier to hand-launch your model.
Example 1
Using the rotary proportional control CTRL 7
If this transmitter control is used, the set-up is extreme-
ly easy. All you have to do is connect the speed control-
ler to any of the receiver servo sockets 5 … 8 which is
vacant.
However, please bear in mind that outputs 2 + 5 and 6 +
7 may already be linked together, depending on the mo-
del type you have selected and the number of aileron
and fl ap servos in your model.
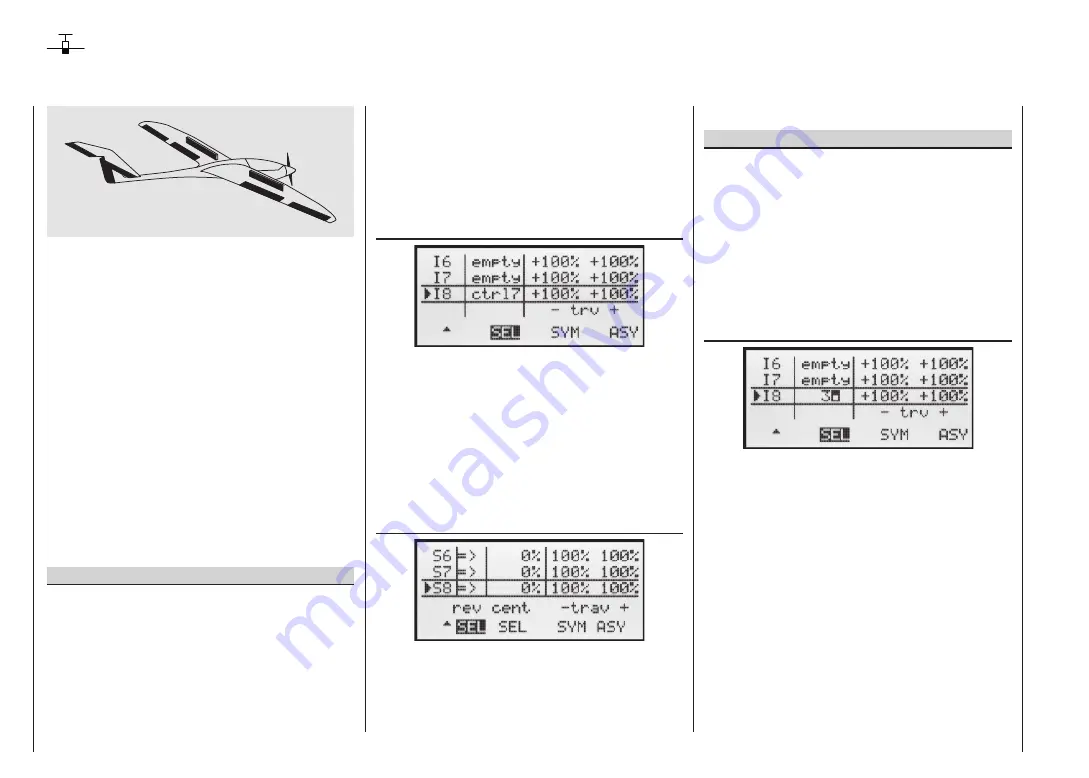
Connect your speed controller to the next vacant input,
and assign the rotary proportional control (CTRL 7) to
the selected input – for example, “E8”. This is accomplis-
hed in the menu …
»Control settings«
(page 50)
Hold the
SELECT
button pressed in, and use the right-
hand rocker button to select the desired line. A further
press on
SELECT
activates “Switch / transmitter control
assignment”. Now turn the knob of the rotary proportio-
nal control. After a brief delay the entry “Transmitter con-
trol 7” will appear in the highlighted fi eld.
In the third column you can adjust servo travel to suit the
speed controller you are using; alternatively you could
use the “Servo travel” column in the …
»Servo settings«
(page 48)
The last stage is to check the settings, so move to the
basic display and then on to »
Servo display
«. In the
“OFF” position of the rotary control CTRL 7 the cont-
rol channel you have selected – in our example this is
channel “8” – should be at -100%, and at the “full-thrott-
le” setting at +100%.
Example 2
Using a two-position switch, SW 1 … 4
This variant implements a pure ON / OFF function,
and results in an “abrupt “ motor start-up … unless the
speed controller you are using features what is known
as a “soft start” function.
At the receiving end you need either a simple electronic
switch or – if you want a smoother motor start – a sui-
table speed controller.
The settings for this arrangement are entered in the …
»Control settings«
(page 50)
First check which receiver socket (5 or higher) is avai-
lable for you to connect your speed controller. If you
have assigned two aileron servos in the »
Base set-
tings
« menu, and if you have not connected any other
auxiliary function, then this would be channel 6; if your
model features two aileron servos and two fl ap servos,
then channel 8 would be available for connecting the
speed controller; the latter option is the one we will use
in this example.
Hold the
SELECT
button pressed in, and use the right-
hand rocker button to select the desired line in the
menu. Press
SELECT
again to activate “Switch or trans-
mitter control assignment”. Now move the selected
switch from the “OFF” position to the “ON” position. The
highlighted fi eld now shows the switch number together
with a symbol which shows the direction of switching.
Programming examples: Fixed-wing model
Summary of Contents for MX-16S
Page 1: ...1...
Page 17: ...17...
Page 31: ...31 Fixed wing models Installation and connections...
Page 35: ...35 Program description Reserving a new memory...
Page 47: ...47 Base settings Model helicopter...
Page 83: ...83 Fail safe...
Page 89: ...89 Programming examples Fixed wing model...
Page 109: ...109 Programming examples Model helicopter...
Page 112: ...112 112...
Page 116: ...116...