



























32
Model helicopters
Model helicopters
The continued development of model helicopters and
helicopter components, such as gyros, speed gover-
nors, rotor blades etc., has led to the current position
where helicopters are capable of sophisticated 3-D ae-
robatics. In contrast, the beginner to helicopter fl ying
needs a simple set-up so that he can quickly get started
on the initial stages of hovering practice, and then gra-
dually work up to more complex models which exploit all
the options provided by the mx-16s.
The helicopter program of the mx-16s can cope with all
current model helicopters equipped with 1...4 servos for
collective pitch control.
Each model memory can include two fl ight phases plus
autorotation.
Three timers are constantly included in the basic screen
display.
You can return to the correct idle position for the digital
C1 trim simply by pressing a button.
“Dual Rate” and “Exponential” are available for roll,
pitch-axis and tail rotor; they can be coupled together,
and programmed to provide two settings.
All the transmitter controls (CTRL) and switches (SW)
can be assigned to inputs 5 … 8 in virtually any order.
This is carried out in the »
Control settings
« menu.
The »
Heli mixer
« menu provides fi ve-point curves for
the collective pitch, throttle and tail rotor mixers, variab-
le separately for each fl ight phase; these provide non-li-
near mixer characteristics. Such advanced features are
not needed by the beginner, who will initially simply set
the hover point to coincide with the centre point of stick
travel. The mixer inputs for collective pitch, roll and pitch-
axis can then be adjusted in the »
Swashplate mixers
«
menu.
In addition to three linear mixers, which can be assigned
in any way you wish and can also be assigned a switch,
the »
Heli mixer
« menu also provides the following pre-
programmed mixers:
1. Collective pitch (with 5-point curve)
2. Ch1
throttle (with 5-point curve)
3. Ch1
tail rotor (with 5-point curve)
4. Gyro
The throttle limit function in the »
Control settings
«
menu provides an effective means of starting the mo-
tor in any fl ight phase. By default the proportional rotary
control CTRL 7 is assigned to this input, and this cont-
rol function determines the maximum throttle servo posi-
tion, i.e. the rotary knob controls the motor over the idle
range. If the rotary knob is turned in the direction of full-
throttle, the programmed throttle curves then take effect.
If you have set up the two timers, they also start recor-
ding the fl ight time automatically. See page 54 for more
information on this.
Note:
If you are fl ying a model helicopter fi tted with a PPM-FM
receiver made by another manufacturer*, which was pre-
viously fl own using another make of transmitter, e.g. for
Trainer mode operations, it may be necessary to re-ar-
range the receiver servo outputs as described on the
next page. However, an alternative method is to use the
»
Receiver output
« sub-menu of the »
Base settings
«
menu; see page 46. Different methods of installing ser-
vos and control linkages may make it necessary to re-
verse the direction of rotation of some servos when pro-
gramming. In both cases this is carried out in the »
Ser-
vo settings
« menu; see page 48.
Note for modellers upgrading from earlier
GRAUPNER
systems:
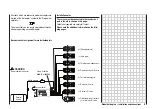
Compared with the previous receiver channel sequence,
servo socket 1 (collective pitch servo) and servo socket
6 (throttle servo) have been interchanged.
The servos must be connected to the receiver output so-
ckets in the order shown on the next page.
Outputs not required are simply left vacant.
For more information on the different types of swashpla-
te, please refer to the »
Base settings
« menu described
on page 43.
*
GRAUPNER does not guarantee that GRAUPNER radio control sys-
tems will work correctly in conjunction with receiving systems and
radio control equipment made by other manufacturers.
Collective
Pitch Curve
Swashplate
Rotation
Roll
Õ
Throttle
Pitch-Axis
Õ
Throttle
Channel 1
Õ
Throttle
Roll
Õ
Tail Rotor
Pitch-Axis
Õ
Tail Rotor
Channel 1
Õ
Tail Rotor
Channe
l 1
Õ
Tail Rotor
Tail Rotor
Õ
Throttle
Summary of Contents for MX-16S
Page 1: ...1...
Page 17: ...17...
Page 31: ...31 Fixed wing models Installation and connections...
Page 35: ...35 Program description Reserving a new memory...
Page 47: ...47 Base settings Model helicopter...
Page 83: ...83 Fail safe...
Page 89: ...89 Programming examples Fixed wing model...
Page 109: ...109 Programming examples Model helicopter...
Page 112: ...112 112...
Page 116: ...116...







































































