





























87
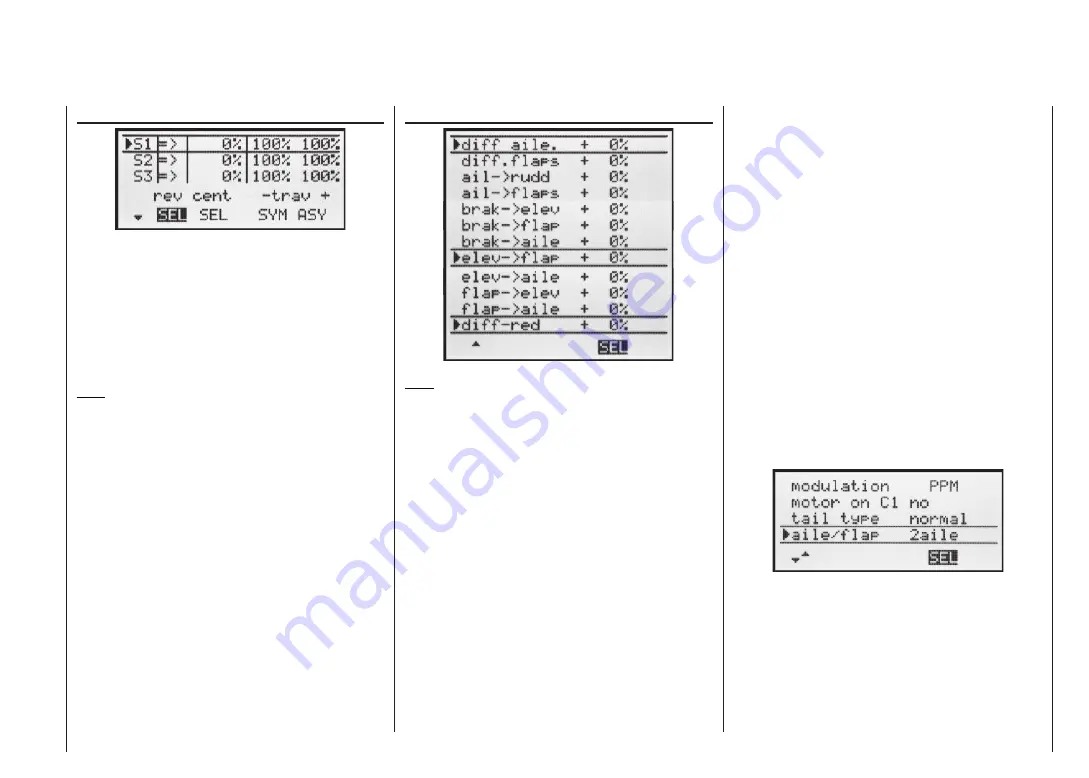
»Servo settings«
(page 48)
In this menu you can set various parameters relating to
the servos, i.e. “
direction of rotation
”, “
neutral
setting
”
and “
servo
travel
”, to suit the requirements of the mo-
del.
By “requirements” we mean adjustments to servo cen-
tre and servo travel which are needed to compensate
for minor tolerances in servos and slight inaccuracies on
the model.
Note:
The facilities provided in this menu for setting asymme-
trical servo travels are not intended for differential travel
on ailerons and / or camber-changing fl aps. There are
functions designed specifi cally for this in the »
Wing mi-
xers
« menu.
Once you have completed the settings described so far,
a fi xed-wing or powered model aircraft (the latter if you
state the idle direction of the throttle stick in the “Motor
at Ch1” line of the »
Base settings
« menu) will, in prin-
ciple, fl y.
However, there are no “refi nements” in this set-up, and
it is the refi nements which will give you more long-term
fun in your fl ying. Assuming that you are already capab-
le of controlling your model safely, it’s time to get a tas-
te of these extra facilities; to this end we now move on
to the ...
»Wing mixers«
(page 61 ... 65)
Note:
This menu will show a varying range of options depen-
ding on the information you have entered in the »
Base
settings
« menu.
Of particular interest at the moment are “
Aileron
diffe-
rential
” and the “
Aileron
rudder
” mixer, in some ca-
ses the combi-switch (coupled aileron and rudder) and
perhaps the mixers “
Brake
aileron
” and “
Brake
fl ap
”.
As already described in detail on page 62, the purpose
of “
aileron
differential
” is to eliminate adverse yaw.
When a model aircraft turns, the down-going aileron pro-
duces more drag than the up-going one if both move th-
rough the same angle, and this causes the model to yaw
in the opposite direction to the turn. This can be elimina-
ted by setting differential servo travel. A value between
20% and 40% is usually a good starting point, but the
“perfect” setting nearly always has to be established by
practical testing.
The same applies to the “
Flap
differential
” option if your
model also features two camber-changing fl ap servos,
assuming that the fl aps are also to be used as ailerons,
e.g. using the “Ail
fl ap” mixer.
The “
Aileron
rudder
” mixer serves a similar pur-
pose, but also makes many models generally easier to
handle when turning. A value of around 50% is usual-
ly a practical starting point. However, it is advisable to
be able to switch this function off, particularly if you have
ambitions as an aerobatic pilot; this is done by assigning
a physical switch to the mixer.
Setting up a “
Brake
elevator
” mixer is usually only
necessary if your model suffers a marked pitch trim
change (model balloons up or dives) when you deploy
any form of braking system. This problem usually only
arises if ailerons are set to defl ect “up” for braking, or
are used in combination with a butterfl y (crow) system.
If you set up such a mixer it is important to test the set-
ting at a safe height, and adjust the trim compensation if
necessary.
If you have selected “2AIL” or “2AIL 2FL” in the “Aileron /
Flap” line of the »
Base
settings
« menu …
… and if you wish to be able to defl ect both ailerons up
using the throttle / brake stick (C1), then a suitable value
should be entered in the “
Brake
aileron
” line.
Programming examples: Fixed-wing model
Summary of Contents for MX-16S
Page 1: ...1...
Page 17: ...17...
Page 31: ...31 Fixed wing models Installation and connections...
Page 35: ...35 Program description Reserving a new memory...
Page 47: ...47 Base settings Model helicopter...
Page 83: ...83 Fail safe...
Page 89: ...89 Programming examples Fixed wing model...
Page 109: ...109 Programming examples Model helicopter...
Page 112: ...112 112...
Page 116: ...116...







































































