





























69
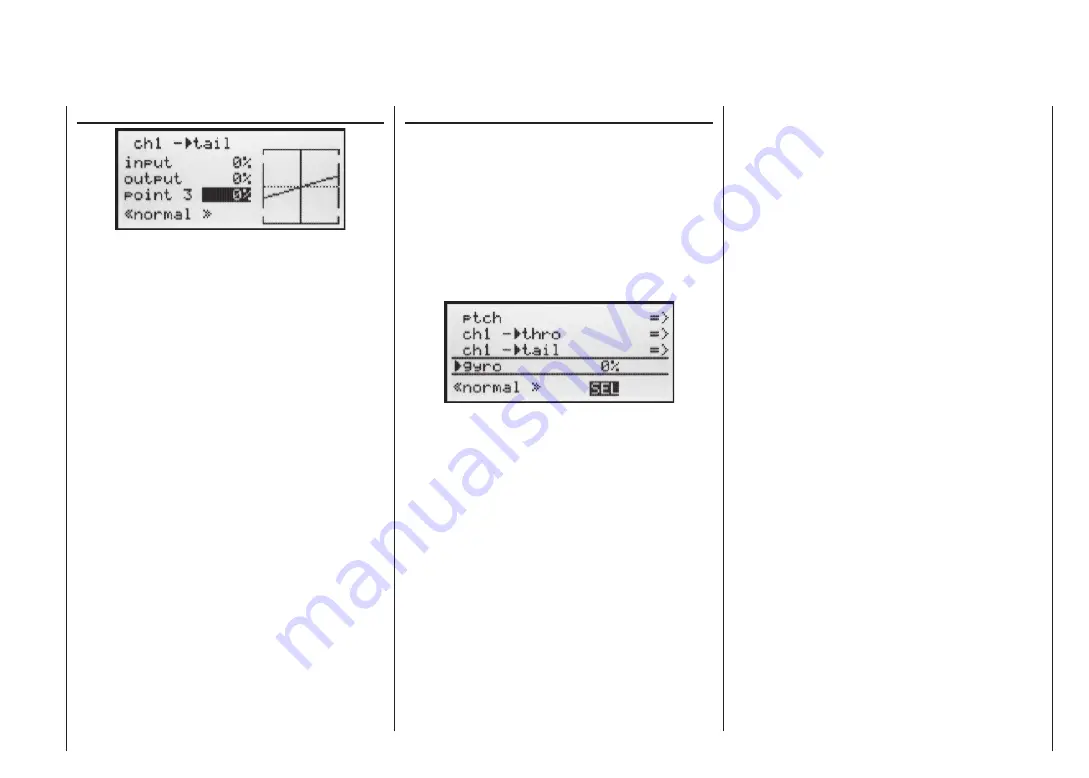
ch1
tail rotor
(static torque compensation)
The purpose of this mixer is to provide static compensa-
tion for main rotor torque. First ensure in the »
Base set-
tings
« menu that the direction of main rotor rotation has
been entered correctly.
The tail rotor control curve can also be defi ned
using up to fi ve points, in a similar way to the collec-
tive pitch curve (see previous page).
This mixer should be set up in such a way that the heli-
copter does not rotate around the vertical (yaw) axis (i.e.
does not deviate from the hover heading) during a long
vertical climb or descent, due to the change in torque of
the main rotor. At the hover the yaw trim should be set
using the digital tail rotor trim lever only.
For a reliable torque compensation setting it is essenti-
al that the collective pitch and throttle curves have been
set up correctly, i.e. that main rotor speed remains con-
stant over the full range of collective pitch.
By default the software includes a tail rotor curve with a
linear mixer ratio of 30%. You can modify the mixer, and
set asymmetrical mixer ratios above and below the ho-
ver point, using the method described above.
When you select autorotation, the mixer automati-
cally switches the value to a variable pre-set value;
see page 74.
Gyro
(adjusting gyro gain)
Most modern gyro systems feature proportional, infi nite-
ly variable adjustment of gyro gain.
If the gyro you wish to use also features this option, the
fl ight phase-specifi c static gyro gain adjustment facili-
ty enables you to fl y normal, slow fl ights with maximum
gyro stabilisation, but to reduce the gyro effect for high-
speed circuits and aerobatics. We recommend that you
set up switchable fl ight phases for this, and set different
gain settings for each phase in the “Gyro” line; values
between -125% and +125% are possible.
Based on the end-points determined for each fl ight pha-
se, gyro gain can be varied proportionally between mi-
nimum and maximum by means of a transmitter cont-
rol assigned in the “Gyro” line in the »
Control settings
«
menu (see page 52). This could be transmitter control
5 (CTRL 5), which would provide infi nitely variable gyro
gain control:
• At the centre position of this transmitter control the
gyro effect always corresponds to the settings selec-
ted here.
• If you press the INC / DEC button in the direction of
full travel (away from centre), the gyro gain increases
accordingly …
• … and reduces again if you press it in the direction of
the opposite end-point.
Adjusting the gyro sensor
If you wish to set up a gyro to achieve maximum possib-
le stabilisation of the helicopter around the vertical axis,
please note the following points:
• The mechanical control system should be as free-
moving and accurate (slop-free) as possible.
• There should be no “spring” or “give” in the tail rotor
linkage.
• You must use a powerful and – above all – fast servo
for the tail rotor.
When the gyro sensor detects a deviation in yaw, the
faster it adjusts the thrust of the tail rotor, the further
the gyro gain adjustor can be advanced without the
tail of the model starting to oscillate, and the better the
machine’s stability around the vertical axis. If the correc-
tive system is not fast enough, there is a danger that the
model’s tail will start to oscillate even at low gyro gain
settings, and you then have to reduce gyro gain further
using the INC / DEC button to eliminate the oscillation.
If the model is fl ying forward at high speed, or hovering
in a powerful headwind, the net result of the stabilising
effect of the vertical fi n combined with the gyro’s stabili-
sing effect may be an over-reaction which manifests it-
self as tail oscillation. In order to obtain optimum sta-
bilisation from a gyro in all fl ight situations, you should
make use of the facility to adjust gyro gain from the
transmitter via the INC / DEC button (CTRL 5).
Heli mixer – Model helicopter
Summary of Contents for MX-16S
Page 1: ...1...
Page 17: ...17...
Page 31: ...31 Fixed wing models Installation and connections...
Page 35: ...35 Program description Reserving a new memory...
Page 47: ...47 Base settings Model helicopter...
Page 83: ...83 Fail safe...
Page 89: ...89 Programming examples Fixed wing model...
Page 109: ...109 Programming examples Model helicopter...
Page 112: ...112 112...
Page 116: ...116...







































































