





























6 Connection
-
17
-
6.3.3.
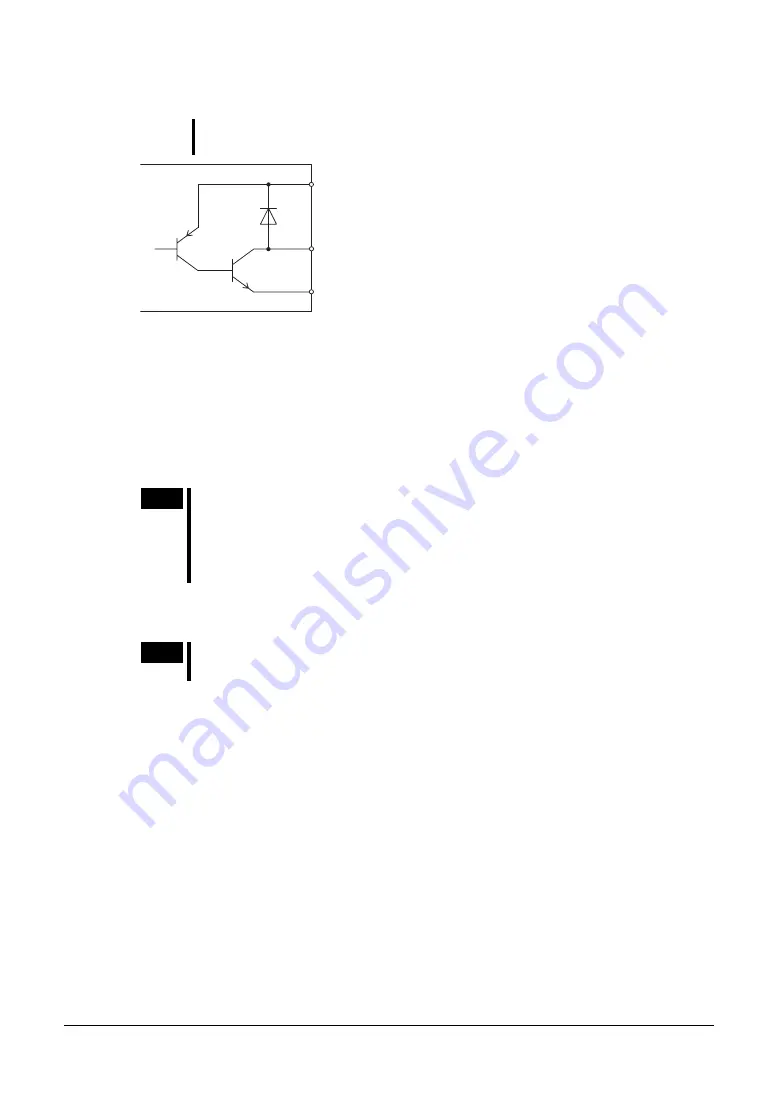
Internal output circuit
Memo
The signal state indicates the “ON: current supplied” or “OFF: current not supplied” status
of the photocoupler inside a host controller rather than the voltage level of the signal.
+COM
25 mA
or less
-COM
ALM, MOVE, READY
OUT1 to OUT6, END
㸢
•
ALM output
The ALM output is turned on when the E-STOP input is turned off, there is an error alarm in the
controller.
Once the problem’s cause is eliminated, the ALM output is cancelled automatically. For more
information on the causes and handling of alarms, see section 11.1 “When the ALARM LED
illuminates” on p.101.
The output logic may be switched between normally open and normally close via command inputs. (Set
to “normally close” at the time of power on.)
Note
•
If a driver alarm signal is input, an alarm will be output when a motor operation
command (INC, ABS, MHOME or SCAN) is executed.
•
If a +LS or -LS signal is input, an alarm will be output when a motor operation
command (INC or ABS) is executed. (Executing a MHOME or SCAN command will
cause the motor to pull out of the LS range.)
•
MOVE output
The MOVE output is turned on during pulse output.
Note
If the rotational direction is switched during mechanical home seeking, the pulse
output will be cut off and the MOVE output will turn off.
•
READY output
The READY output is turned on when the controller is ready to accept the START input.
The READY output is turned off while the sequence program is being executed or modified.
•
OUT1 to OUT6 outputs
General-purpose outputs.
All of the outputs will turn off when a sequence program is started.
•
END output
One-shot output will be performed after a positioning operation.
The amount of output time can be changed via command input. (Set to 10 ms at the time of
power on.)
If END input from the driver is set to “used” via command input, pulse output from the controller will
cease. When the END input from the driver turns on, END output also turns on.
Содержание EMP400 Series
Страница 115: ......







































































