





























5.3 Updating revolution counters
5.3.1 Updating revolution counters on IRC5 robots
Introduction
This section describes how to do a rough calibration of each manipulator axis by
updating the revolution counter for each axis, using the FlexPendant.
Step 1 - Manually running the manipulator to the synchronization position
Use this procedure to manually run the manipulator to the synchronization position.
Note
Action
Select axis-by-axis motion mode.
1
See
Synchronization marks and synchron-
ization position for axes on page 810
Jog the manipulator to align the synchron-
ization marks.
2
Step 2 - Updating the revolution counter
with the FlexPendant on page 813
When all axes are positioned, update the
revolution counter.
3
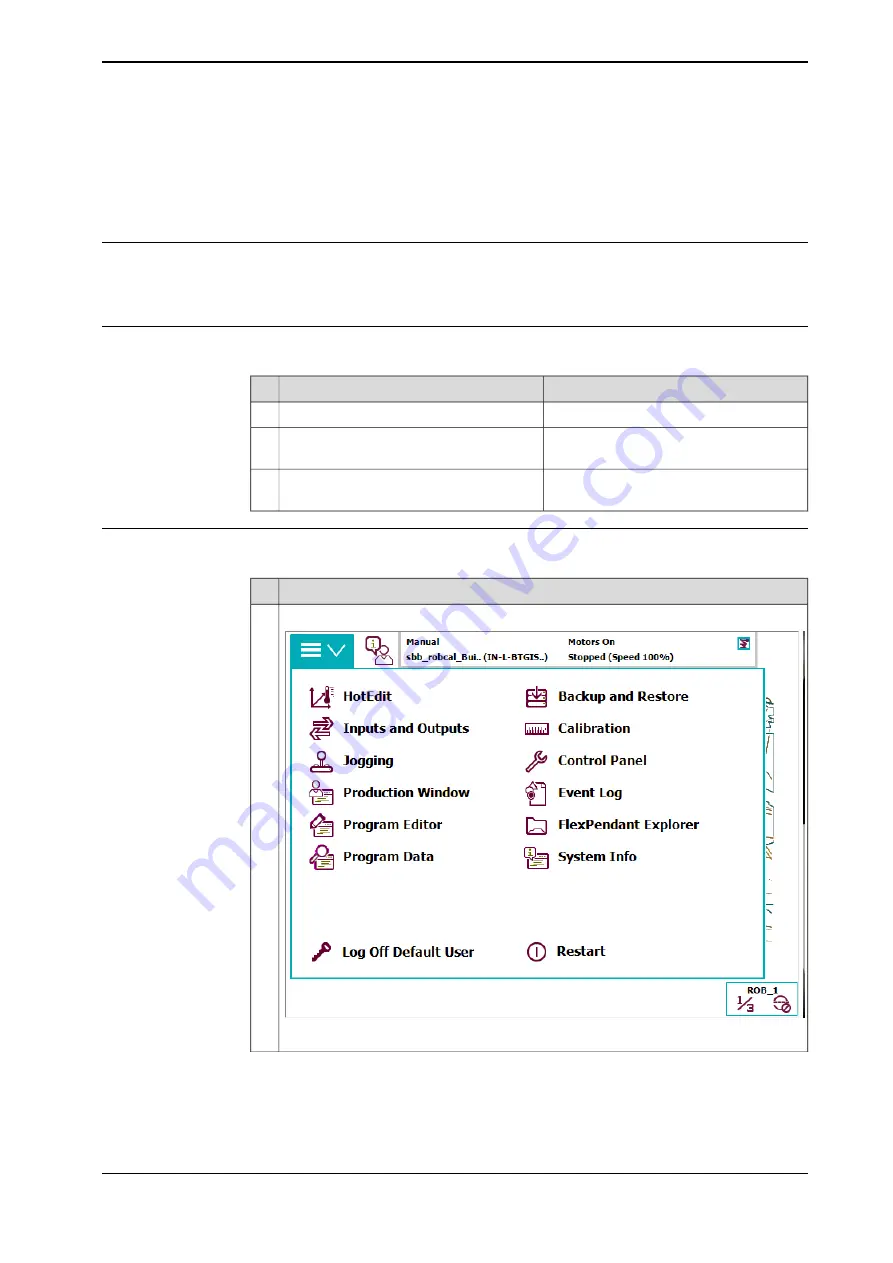
Step 2 - Updating the revolution counter with the FlexPendant
Use this procedure to update the revolution counter with the FlexPendant (IRC5).
Action
On the
ABB
menu, tap
Calibration
.
xx1500000942
1
Continues on next page
Product manual - IRB 1200
813
3HAC046983-001 Revision: S
© Copyright 2014 - 2021 ABB. All rights reserved.
5 Calibration
5.3.1 Updating revolution counters on IRC5 robots
Содержание IRB 1200
Страница 1: ...ROBOTICS Product manual IRB 1200 ...
Страница 2: ...Trace back information Workspace 21D version a15 Checked in 2021 12 16 Skribenta version 5 4 005 ...
Страница 156: ...This page is intentionally left blank ...
Страница 896: ...This page is intentionally left blank ...
Страница 898: ...This page is intentionally left blank ...
Страница 905: ......