





























12 Functional Descriptions
09.01
12.18.11 GI monitors
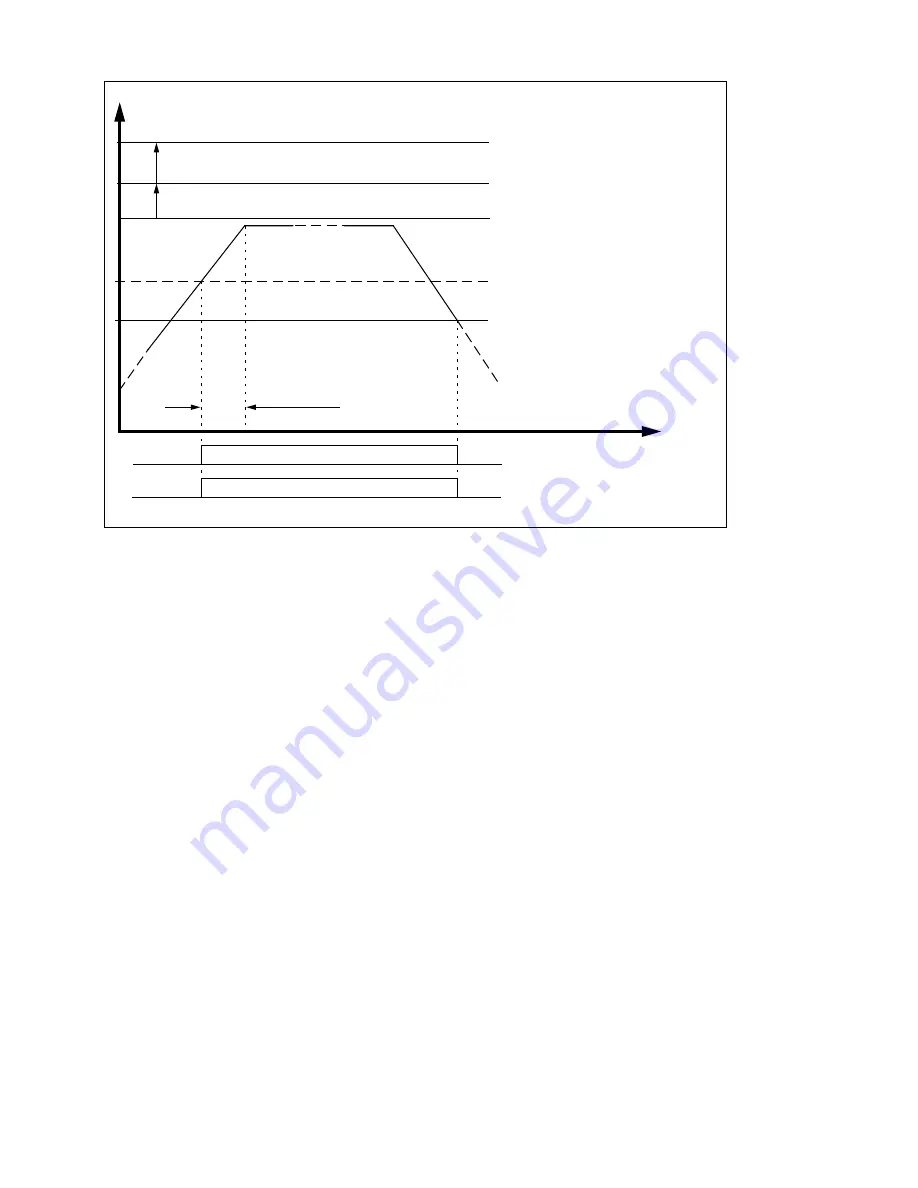
Characteristic of the velocity setpoint with the characteristic rising above and falling below the warning threshold
n
FA
a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a
approx.20%
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
approx.10% control reserve
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
MD 264*
Drive error threshold
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
MD 268*
max.setpoint (IPO STOP)
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
MD 1736*-1764*
Alarm limit velocity:
1st PaSa - 8thPaSa (param. set)
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a
MD 1448*
Warning threshold
n
max
and a
max
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a
7/8 · MD1448*
Hysteresis threshold
a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a
Reaction time
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
PLC interface signal:
Vel. warning thresh. reached
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
internal:
Velocity limitation approached
In NC channels where axes are traversed which are enabled for velocity/acceleration limitation,
the acceleration in the path is stopped as follows:
Path set velocity = path actual velocity
The acceleration of released spindles is stopped if:
Set speed = actual speed
Due to non-linear movements of the leading axes (circle, Spline, IKA, transformation, etc.), the
velocity of the following axis may increase despite an acceleration stop of the leading axes.
In order to reduce the path velocity, the actual path set velocity is evaluated with a reduction
factor (MD 335 "Minimum reduction factor with velocity limitation following axis warning
threshold"), similar to an override. The channel thus calculates the path set velocity as follows:
V
path_set
=
Vpath_set
· MD335
In doing so, the interpolation grouping of the axes involved in the path, as well as the active
links, remain unchanged.
If the following axis velocity falls again below the hysteresis threshold, the request for
velocity/acceleration limitation is reset for all axes and spindles of the mode group. The
reduction factor in the NC channels is reset to 100%.
In order to avoid oscillations within the range of the hysteresis threshold and to bridge
machining steps temporarily resulting in an unfavorable velocity/acceleration override, the
increase of the reduction factor can be slowed down by means of MD 336 "Velocity increase
factor".
12–144
© Siemens AG 1992 All Rights Reserved 6FC5197- AA50
SINUMERIK 840C (IA)
Summary of Contents for SIMODRIVE 611-D
Page 2: ......







































































