





























12 Functional Descriptions
06.93
12.16.3 Installation
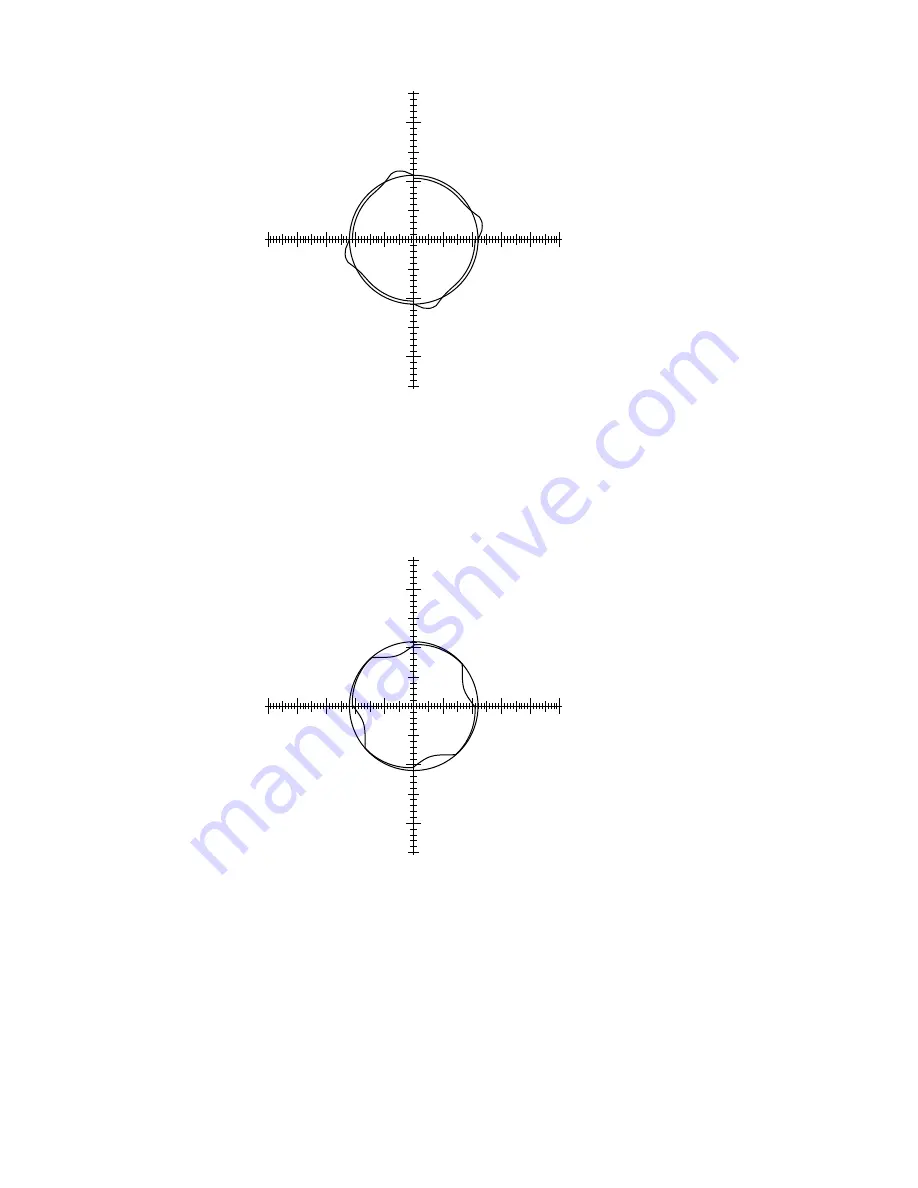
Figure 5 Compensation time constant too small
a a
a a
a a
a a
II
a a a
a a a
a a a
a a a
IV
a a
a a
a a
a a
I
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
Counter 1
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
Counter 2
a a a
a a a
a a a
a a a
III
If the value for the compensation time constant chosen for the circularity test is too high, we
see that the radius deviation at the quadrant transition points is compensated for (it is assumed
that the optimum compensating amplitude has been found), but that after the quadrant
transition point the radius deviation is less that the programmed radius (see Figure 6).
Figure 6 Compensation time constant too large
a a
a a
a a
a a
II
a a a
a a a
a a a
a a a
IV
a a
a a
a a
a a
I
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
Counter 1
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
a a a a a a a a a a a a a
Counter 2
a a a
a a a
a a a
a a a
III
If it is not possible to find a uniform compensation time constant for the various radii and
velocities, the average value of the derived time constants is used.
If it has been possible to achieve a good result with these time constants and the constant
compensating amplitude across the whole working range, i.e. for all required radii and
velocities and for positioning, characteristic adaptation (MD 1804*, bit 7) is no longer needed.
12–122
© Siemens AG 1992 All Rights Reserved 6FC5197- AA50
SINUMERIK 840C (IA)
Summary of Contents for SIMODRIVE 611-D
Page 2: ......







































































