





























9-53
Magnetek Quattro AC Quick Reference
iControl AC
9
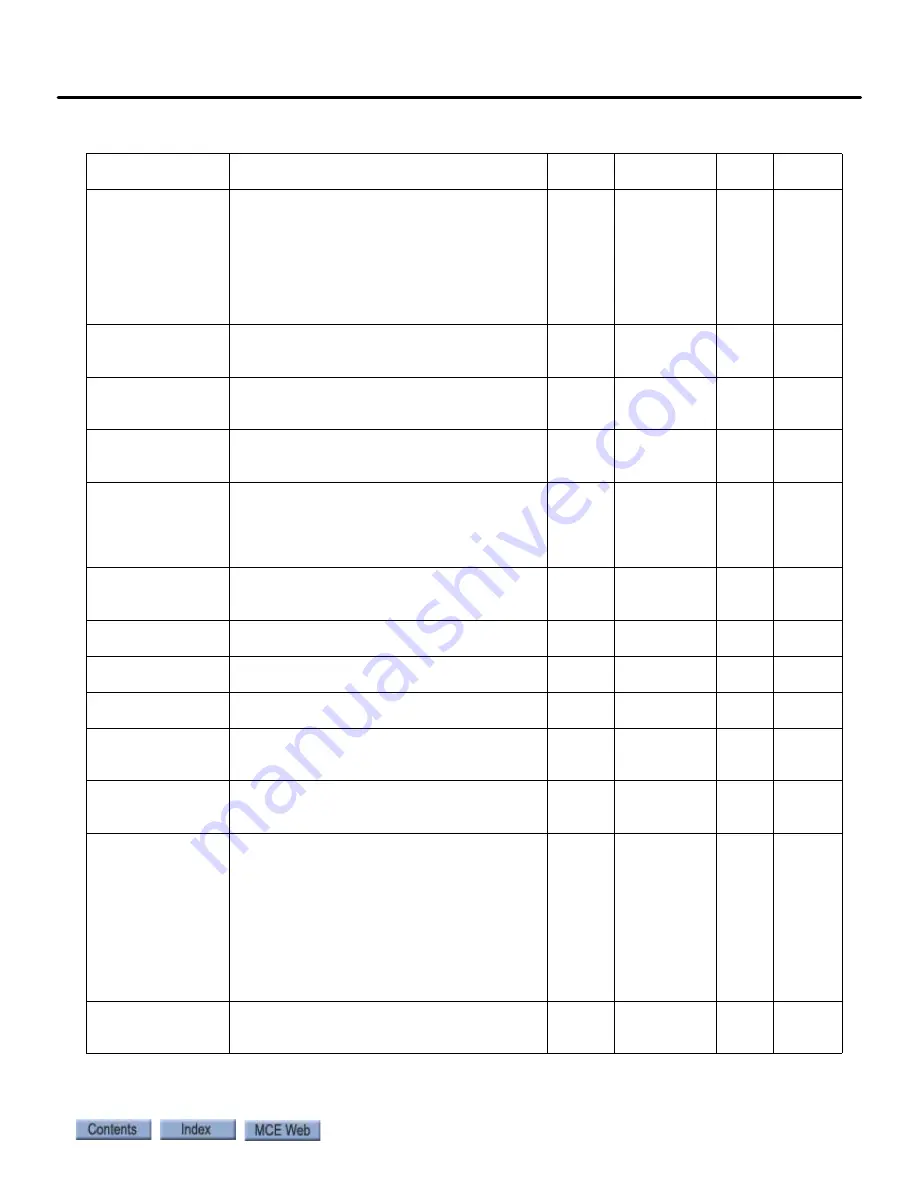
OVERSPEED MULT Sets percentage of CONTRACT CR SPD (A1)
for OVERSPEED TEST (U4)
%
100.0 – 150.0 125.0 125.0
ENCODER PULSES Sets pulses per revolution (per channel) drive
expects from encoder. Set to agree with
pulses per revolution on encoder nameplate if
directly coupled to motor shaft. If roller is
used to measure linear velocity, this is a cal-
culated value equal to counts expected from
encoder when motor makes exactly one revo-
lution.
PPR
600 – 20000 2048
*
SERIAL CNT / REV
Number of discrete absolute positions per
rotor revolution from absolute encoder.
Heidenhain = 8192.
Cnts /
rev
600 – 25000 8192
*
ABS REF OFFSET
Magnetek personnel only. Sets angular offset
for absolute position reference exported
through an analog output.
Deg
-180.00 -
+180.00
0.00
SPD DEV LO LEVEL Range around speed reference for speed devi-
ation low logic output. Percent of contract
speed.
% of
contract
spd
0.1 – 20.0
10.0
10.0
SPD DEV TIME
Speed deviation time. Defines time speed
feedback needs to be in range around speed
reference defined by SPD DEV LO LEVEL
before Speed Deviation Low logic output is
true.
Sec
0.00 – 9.99
0.50
0.50
SPD DEV ALM LVL
Speed deviation alarm level. Sets level at
which a speed deviation alarm will be
declared.
%
0.0 – 99.9
10.0
10.0
SPD DEV FLT LVL
Speed deviation fault level. Sets the level at
which a speed deviation fault is declared.
%
0.0 – 99.9
25.0
25.0
SPD COMMAND
BIAS
Subtracts an effective voltage from the actual
analog speed command signal.
volts
0.00 – 6.00
0.00
0.00
SPD COMMAND
MULT
Scales the analog speed command.
none
0.90 – 5.00
1.00
1.00
PRE TORQUE BIAS Subtracts an effective voltage from actual
analog pretorque / torque command (channel
2) voltage signal.
volts -6.00
–
+6.00
0.00 0.00
PRE TORQUE MULT Scales analog pretorque / torque command
(channel 2). If set to 1.00, a 10V signal will
call for 100% torque.
none -10.00
–
+10.00
1.00 1.00
PRE TORQUE TIME Time to ramp torque from zero to pretorque
value. When set to zero, Pretorque applied
immediately. Helps eliminate bump felt upon
starting caused by torque being immediately
set to rated pretorque. Setting to zero will dis-
able Pre Torque Ramp Up function. With a
non-zero setting for Pre Torque Time, torque
reference will be linearly ramped from zero to
value given through Analog input or serial
channel.
sec 0.00
–10.00
0.00
0.00
ZERO SPEED LEVEL Sets threshold for zero speed detection. Used
only to generate zero speed logic output.
% of
contract
spd
0.00 – 99.99 1.00
1.00
Table 10. Quattro PM Elevator Drive, iControl
Summary of Contents for Nidec iControl
Page 1: ...MOTION CONTROL ENGINEERING User Guide iControl with AC Drive...
Page 15: ......
Page 23: ...1 8 Manual 42 02 2223 iControl Overview...
Page 75: ...2 52 Manual 42 02 2223 Construction Mode...
Page 89: ...3 14 Manual 42 02 2223 Inspection Mode...