





























NOTE
Parameterization is carried out in the selected user unit for the
position as integer values. It is advisable to use the same number
of correction interpolation points for the positive and negative
directions. The first and last correction values in the table must be
zero in order to avoid instability (step changes) of the actual
position value. Differing correction values for the positive and
negative directions at the same interpolation point will lead to
instability in the associated actual position value when the
direction is reversed, and so possibly to a step response
adjustment to the reference position.
MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
100
6 Encoder
6.11 Oversampling
Encoder signal oversampling optimizes the accuracy of resolver and Sin/Cos
signals. This function can only be used, if necessary, for low-track Sin/Cos encoders
and resolvers; using it for high-track Sin/Cos encoders is
not permitted.
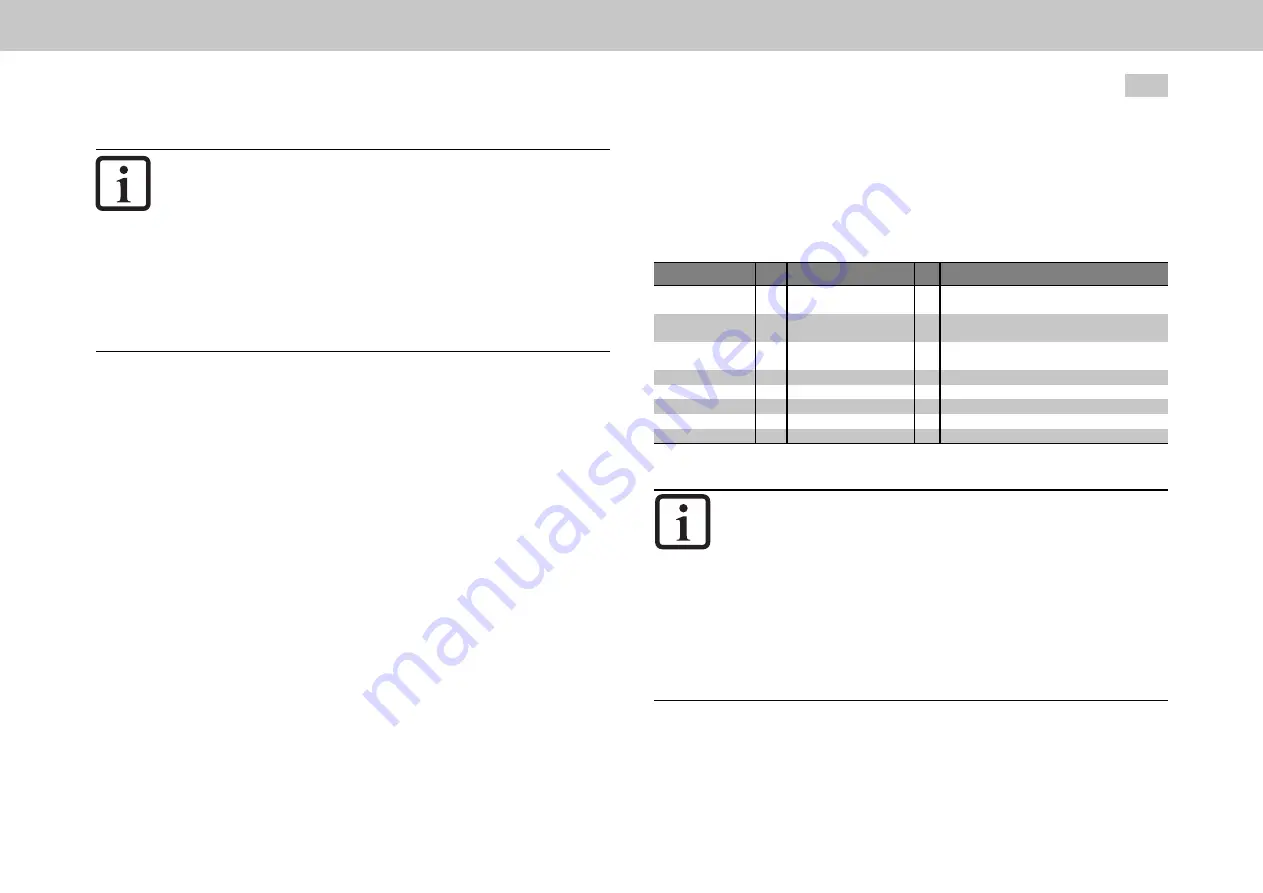
ID
Index Name
Unit Description
1956
CON_ACT_Ovrs
Encoder signal oversampling. This function
applies only to resolver and Sin/Cos signals
1956
0
active
Switch for activating and deactivating the
function
1956
1
pmeas
The percentage measuring time for oversampling
dependent on the sampling time.
1956
2
filtershift
Limit frequency for the oversampling filter
1956
3
sourceselect
Signal source for oversampling
1957
CON_ACT_Ovrs_Tracks
Oversampled track signals
1957
0
Track_a
1957
1
Track_b
Table 6.36: Oversampling parameters
NOTE
When oversampling is enabled, instead of the normal A/D signals
the oversampled signals for the encoder specified in parameter
P 1956[3] - sourceselect
are used. In the case of high-track
Sin/Cos encoders in particular, the low limit frequency of the
oversampling filters may result in quadrant errors. If the
oversampling units are used, it must always be certain that the
encoder does not dramatically exceed the specified limit
frequencies.
Before using oversampling, consult with your project supervisor or
the Moog Helpline.







































































