





























MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
121
7 Control
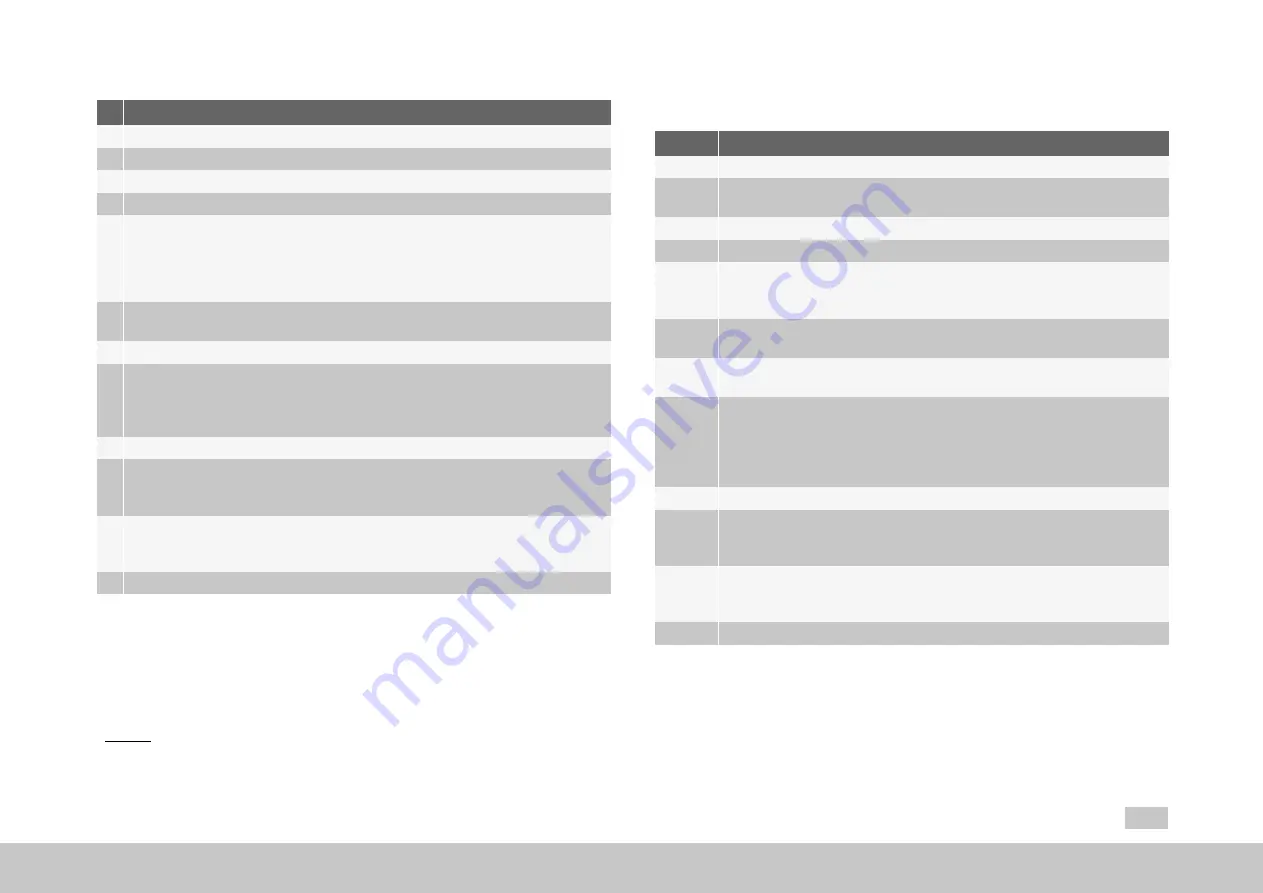
No. Action
1
Open manual mode window
2
Speed control mode control setting (set high rigidity, for smooth running)
3
Start control
4
Run motor at low speed (≤ 1 rpm).
5
Set the position source for the teaching, activate teaching: Select
P 385[0] - CON_TCoggTeachCon = (6)TeachEpsM or select
P 385[0] - CON_TCoggTeachCon = (11)TeachSTPosPcon.
The teaching routine begins.
6
Wait until at least 1 motor revolution is completed in the teaching routine
(internal filter time).
---
Check
P 440[0] - CON_TAB_TabIndex
and
P 446[0] - CON_TAB_OutVal
7
With the control still operating, the teaching is then stopped by calling the
calculation function once:
P 385[0] - CON_TCoggTeachCon = (8)CALC2.
This imports all values into the
internal compensation table (big table with 4000 elements).
8
Stop control
9
Start the compensation:
P 382[0] - CON_TCoggComp = (3)EPSM
After this, the q-current feed forward control becomes active when the control is
restarted.
10
Save device data.
- The position source used by the teaching is also saved here. It will later be
used for the compensation once again in exactly the same manner.
11
Use the scope to monitor IsqRef_Comp
7.3.4.7 Compensation as a function of the electrical angle
(EPSRS), big table
Teaching routine and compensation
big CompTab (4000)
- Incremental, ‘rotary' recurring position
- Without offset and delta, with tuning, with fader
- (12) Teach epsrs, commutation angle (electrical)
No.
Action
1
Open manual mode window
2
Set the speed control mode (set high stiffness, for radial true running) Set
speed control mode.
3
Start control
4
Run motor at low speed (≤ 1 rpm).
5
Set the position source for the teaching, activate teaching: Select
P 385[0] - CON_TCoggTeachCon = (12)TeachEpsRS-3
.
The
teaching routine begins.
6
Wait until at least 1 motor revolution is completed in the teaching routine
(internal filter time).
---
Check
P 440[0] - CON_TAB_TabIndex
and
P 446[0] - CON_TAB_
OutVal
7
With the control still operating, the teaching is then stopped by calling the
calculation function once:
P 385[0] - CON_TCoggTeachCon = (8)CALC2.
This imports all values into the internal compensation table (big table
with 4000 elements).
8
Stop control
9
Start the compensation:
P 382[0] - CON_TCoggComp = (3)EPSM
After this, the q-current feed forward control becomes active when the
control is restarted.
10
Save device data.
- The position source used by the teaching is also saved here. It will later
be used for the compensation once again in exactly the same manner.
11
Use the scope to monitor IsqRef_Comp