The position references are used to generate pre-control values for speed
and acceleration. These are scanned using the position controller’s cycle
time (normally 125 µs) and fed into the control loops.
8.3.2.1 Motion profile / Basic settings
In this dialog box the basic settings for the motion profile are made according to the
list boxes. If Profile Generator and IP mode are enabled, the reference value is
influenced by both functions.
Reference
Source
P 0165
-OFF (0)
-ANA0 (1)
-ANA0 (2)
-Tab (3)
-leer (4)
-PLC (5)
-PARA (6)
-CiA DS402 (7)
-SERCOS (8)
-PROFIBUS (9)
-Varan (10)
Normierung
-DS402
-SERCOS
-Benutzerdefiniert
IP-Method
NoIP (0) =
Aus
linear IP
SplineExtFF(2) = IP with external feedforward
SplineII(3) = Kubische Spline IP
NonIPSpline(4) = Kubische Spline approximation
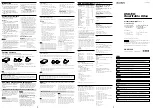
Referencevalue
Profilegenerator
PG-Mode
- Ramps
- Smoothing
- Filter
Referencevalue
Userunit
Referencevalue
Increments
Samplingtime
1 ms
Samplingtime
≥ 125 µs
Position control
Fig. 8.27: PG mode with position control
8.3.3 IP mode with speed control
In IP (Interpolation) mode the appropriate reference source and correct scaling of
units are selected for the speed reference before the reference is passed via the
interpolator to the control. Linear interpolation is always applied in this process.
MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
182
8 Motion profile
Interpolation (IP) mode
Reference values are interpolated in linear mode before being switched to
the control loops.
The profile generator is inactive.
Ramps and smoothing are inactive.
The reference values are switched directly to the closed-loop control.
CAUTION!
Your system/motor may be damaged if put into operation in
an uncontrolled or inadequate manner.
Improper conduct can cause damage to your system
machine
Before the “Start” step, make absolutely sure that a valid
setpoint has been entered, as the configured setpoint
will be immediately transmitted to the motor after the
motor control function starts, which may result in the
motor accelerating unexpectedly.
Speed control in IP mode:
Control mode
P 300[0] - CON_CfgCon
= speed control or setting via Modes
of Operation (CAN, EtherCAT®)
Selection of reference source
P 165[0] - MPRO_REF_SEL
Scaling
Linear interpolation is always applied in speed control.
Bus sampling rate: The bus sampling time is custom-set according to the
application.