





















Purpose
Purpose
The Class 5 SmartMotor™ Installation and Startup Guide provides an overview of the Class 5
SmartMotor, along with information on unpacking, installation and start up. This guide is meant to be
used in conjunction with the
SmartMotor Developer's Guide
, which describes the SmartMotor features,
SMI
software, programming, commands, and other topics related to SmartMotor application
development.
The information in this guide is meant to be used by properly trained technical personnel only. Moog
Animatics conducts classroom-style SmartMotor training several times per year, as well as product
seminars and other training opportunities. For more information, please see the Moog Animatics
website or contact your Moog Animatics representative.
Combitronic Technology
The most unique feature of the SmartMotor is its ability to communicate with other SmartMotors and
share resources using Moog Animatics’ Combitronic™ technology. Combitronic is a protocol that
operates over a standard CAN interface. It may coexist with either CANopen or DeviceNet protocols. It
requires no single dedicated master to operate. Each SmartMotor connected to the same network
communicates on an equal footing, sharing all information, and therefore, sharing all processing
resources.
For additional details, see the
SmartMotor™ Developer's Guide
.
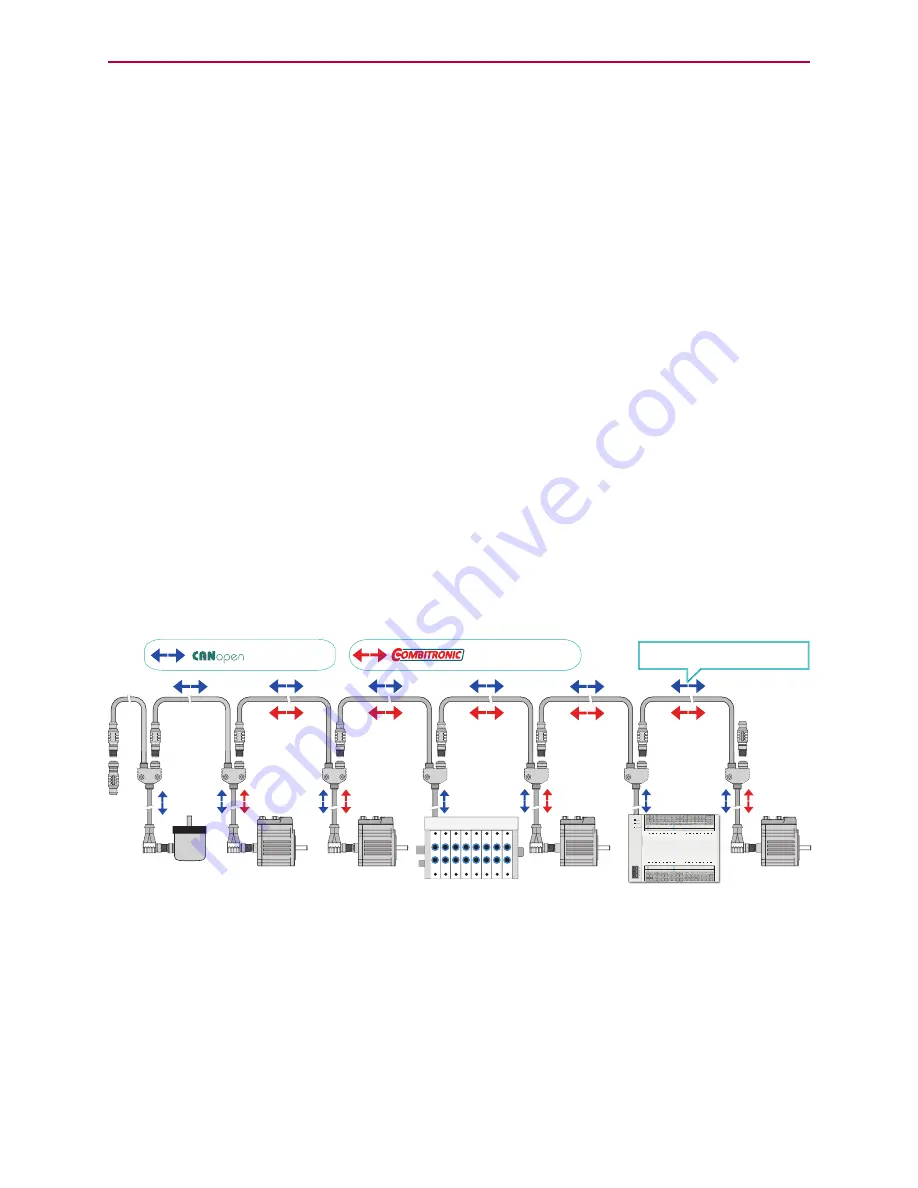
I/O
Device CAN
Bus Master
Expanded I/O
capability allows the SmartMotor to interface with standard CiA 301 CANopen devices
and function as the I/O device CAN bus master (i.e., no external bus master needed). For more details,
see the
SmartMotor™ Developer's Guide
. For CANopen
object descriptions, see the
Class 5
SmartMotor™ CANopen Guide
.
CANopen
ABS Encoder
Be sure to follow proper guidelines for CAN bus cabling and termination.
CANopen Valve Block
CANopen
REMOTE I/O
Without data collision!
TM
Motor to Motor
Motor to I/O
®
SmartMotor as I/O
Device CAN Bus Master
Moog Animatics Class 5 SmartMotor™
Installation and Startup Guide,
Rev. I
Page 7 of 76







































































