





























4-190
Chapter
4
OPERA
TION
4-191
12. "SYSTEM" mode
5. Incremental Mode /INCMOD
This parameter sets whether to have origin incomplete status every time power to
this controller is turned on. This is automatically set invalid when the parameters are
initialized.
n
NOTE
• When this parameter is valid (enabled), return-to-origin will always be
incomplete each time the controller power is turned on. Absolute reset
must therefore always be performed.
• Enable this parameter if the controller does not have an absolute battery
installed.
c
CAUTION
This parameter must be disabled (invalid) if the robot has an axis using the
mark method for origin detection.
[Procedure]
1) Select "5. Incremental Mode" in "SYSTEM>PARAM>OTHERS" mode.
2) Press
(EDIT).
The function key menu changes.
■
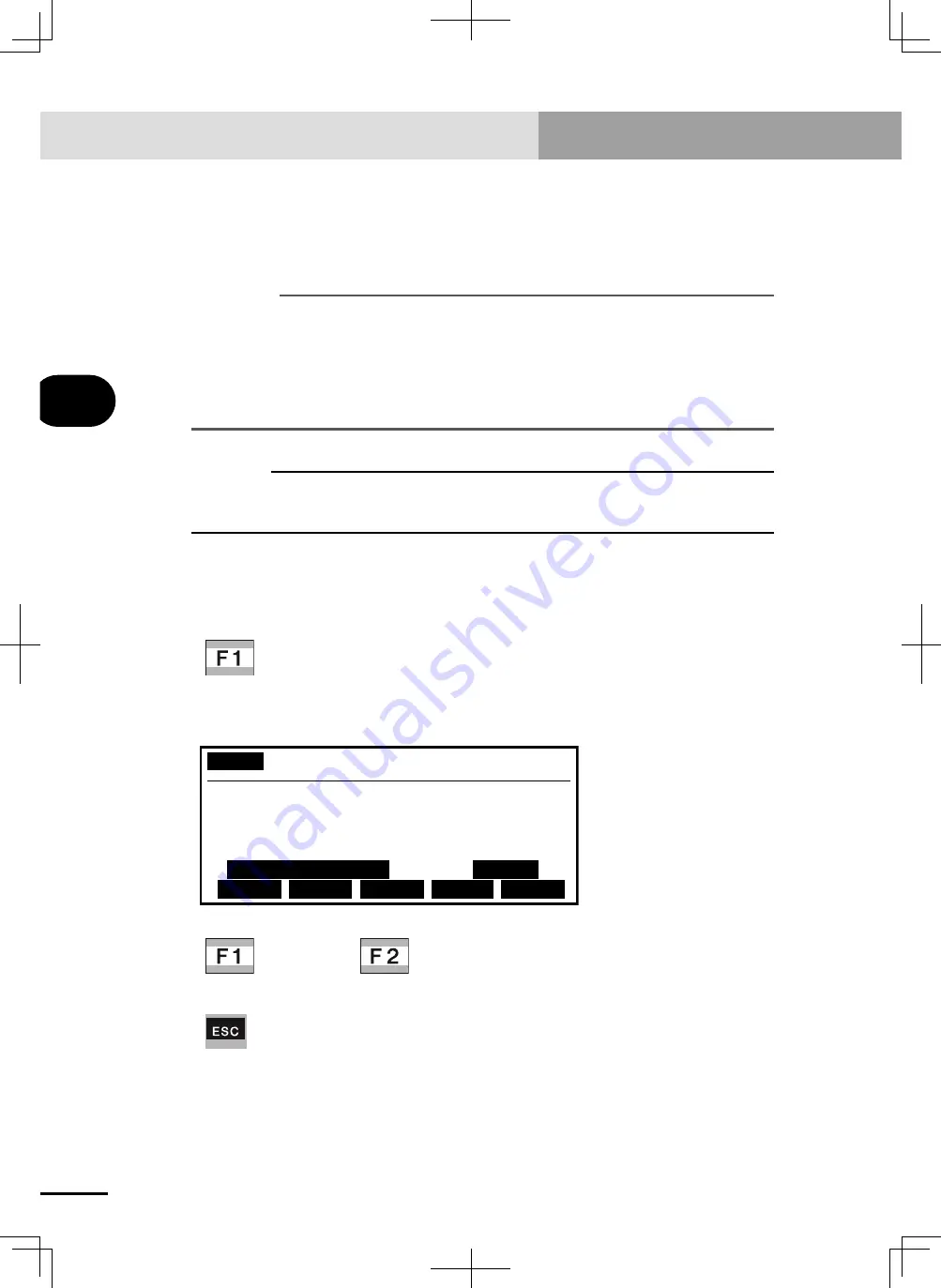
Setting "Incremental Mode"
SYSTEM
>PARAM>OTHERS
V9.08
INVALID VALID
1.Display language(JPN/ENG) ENGLISH
2.Data display length 6char
3.Parameter display unit PULSE
4.DO cond. on EMG HOLD
5.Incremental Mode INVALID
3) Press
(INVALID) or
(VALID).
4) Press
to quit the edit mode.
Содержание RCX222
Страница 1: ...RCX222 EUR2153130 E99 Ver 1 30 Userʼs Manual YAMAHA 2 AXIS ROBOT CONTROLLER ...
Страница 2: ......
Страница 14: ......
Страница 43: ......
Страница 46: ......
Страница 50: ...4 MEMO ...
Страница 51: ...Chapter 1 USING THE ROBOT SAFELY Contents 1 Operating environment 1 1 ...
Страница 52: ......
Страница 56: ......
Страница 98: ......
Страница 388: ......
Страница 412: ...5 24 MEMO ...
Страница 414: ......
Страница 430: ......
Страница 442: ......
Страница 450: ...8 8 MEMO ...
Страница 452: ......
Страница 523: ......