




























8. TROUBLESHOOTING
8 - 21
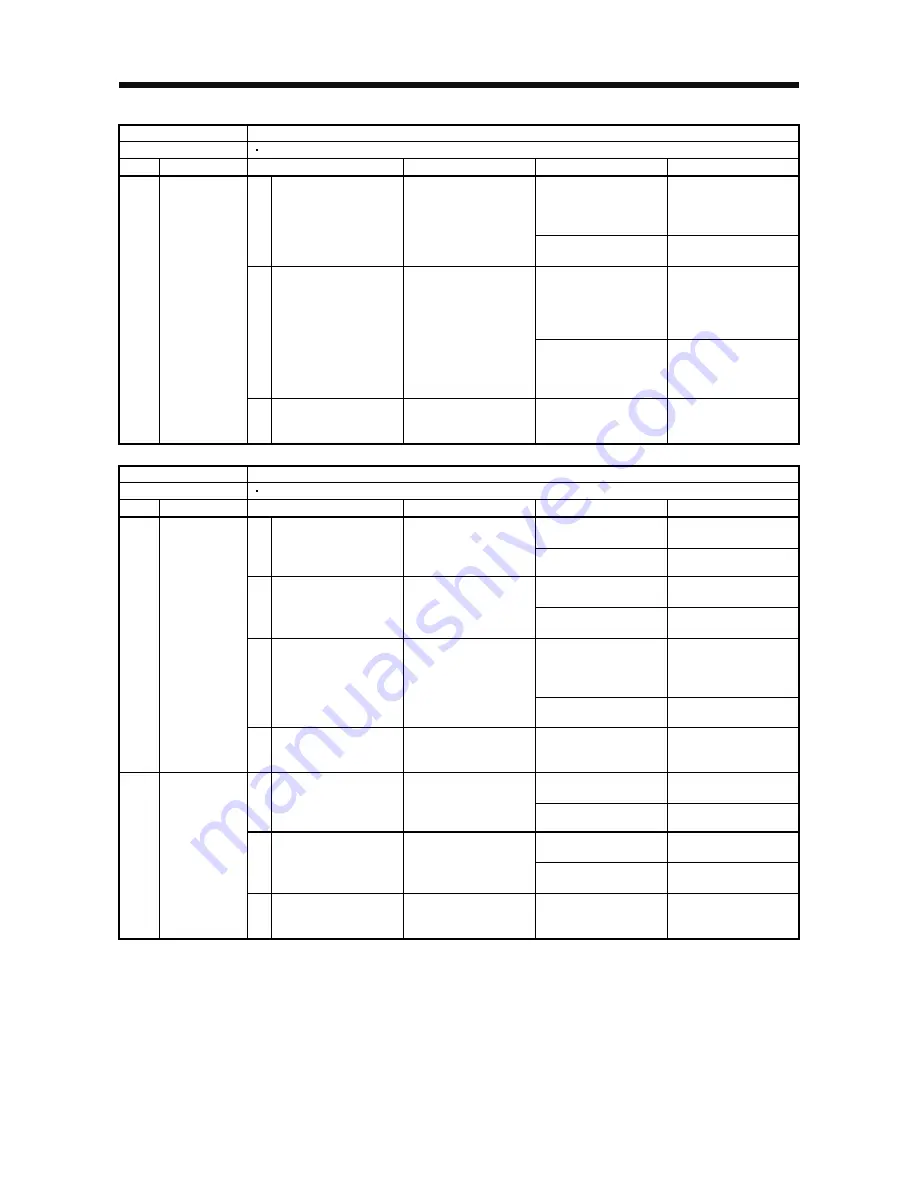
Alarm No.: 54
Name: Oscillation detection
Alarm content
An oscillation of the servo motor was detected.
Display Detail name
Cause
Check method
Check result
Action
54.1 Oscillation
detection error
(1) The servo system is
unstable and oscillating.
Check if the servo motor
is oscillating.
Check the torque ripple
with MR Configurator2.
The torque ripple is
vibrating.
Adjust the servo gain
with the auto tuning. Set
the machine resonance
suppression filter.
The torque ripple is not
vibrating.
Check (2).
(2) The resonance
frequency has changed
due to deterioration.
The resonance
frequency of the
equipment is different
from the filter setting
value.
Change the setting value
of the machine
resonance suppression
filter.
Measure the resonance
frequency of the
equipment and compare
it with the setting value of
the machine resonance
suppression filter.
The resonance
frequency of the
equipment is the same
as the filter setting value.
Check (3).
(3) An encoder is
malfunctioning.
Replace the servo motor,
and then check the
repeatability.
It is not repeatable.
Replace the servo motor.
Alarm No.: 56
Name: Forced stop error
Alarm content
The servo motor does not decelerate normally during forced stop deceleration.
Display Detail name
Cause
Check method
Check result
Action
56.2
(1)
It is not repeatable.
Adjust the deceleration
time constant.
Over speed
during forced
stop
The forced stop
deceleration time
constant is short.
Increase the parameter
setting value of [Pr.
PC51], and then check
the repeatability.
It is repeatable.
Check (2).
(2) The torque limit has
been enabled.
The limiting torque is in
progress.
Review the torque limit
value.
Check if the limiting
torque is in progress.
The limiting torque is not
in progress.
Check (3).
(3) The servo system is
unstable and oscillating.
Check if the servo motor
is oscillating.
Check the torque ripple
with MR Configurator2.
The torque ripple is
vibrating.
Adjust the servo gain.
Set the machine
resonance suppression
filter.
The torque ripple is not
vibrating.
Check (4).
(4) An encoder is
malfunctioning.
Replace the servo motor,
and then check the
repeatability.
It is not repeatable.
Replace the servo motor.
56.3
(1)
It is not repeatable.
Adjust the deceleration
time constant.
Estimated
distance over
during forced
stop
The forced stop
deceleration time
constant is short.
Increase the parameter
setting value of [Pr.
PC51], and then check
the repeatability.
It is repeatable.
Check (2).
(2) The torque limit has
been enabled.
The limiting torque is in
progress.
Review the torque limit
value.
Check if the limiting
torque is in progress.
The limiting torque is not
in progress.
Check (3).
(3) An encoder is
malfunctioning.
Replace the servo motor,
and then check the
repeatability.
It is not repeatable.
Replace the servo motor.
Содержание MELSERVO-JE MR-JE-100A
Страница 23: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO ...
Страница 29: ...2 INSTALLATION 2 6 MEMO ...
Страница 91: ...3 SIGNALS AND WIRING 3 62 MEMO ...
Страница 171: ...5 PARAMETERS 5 44 MEMO ...
Страница 195: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Страница 221: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 26 MEMO ...
Страница 249: ...8 TROUBLESHOOTING 8 28 MEMO ...
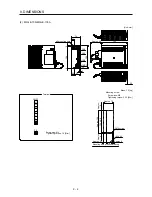
Страница 254: ...9 DIMENSIONS 9 5 2 SCR connector system 3M Receptacle 36210 0100PL Shell kit 36310 3200 008 Unit mm 34 8 39 5 22 4 11 0 ...
Страница 255: ...9 DIMENSIONS 9 6 MEMO ...
Страница 263: ...10 CHARACTERISTICS 10 8 MEMO ...
Страница 293: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 30 MEMO ...