





























101
Section V.
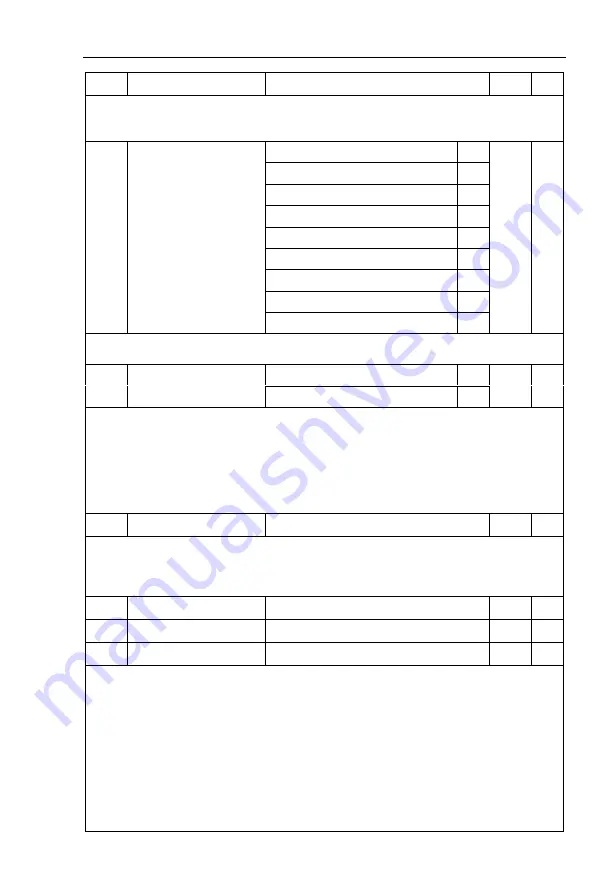
Parameter Function Table
PA.01
PIDreference value
0.0%~100.0%
50.0%
☆
It is used to select target parameter reference channel of process PID.
Set target value of process PID is a relative value, set range is 0.0%~100.0%. PID feedback value is a
relative value as well,PID play the role of making the two relative value the same.
PA.02
PID feedback source
AI1
0
0
☆
AI2
1
AI3(Potentiometer)
2
AI1
-
AI2
3
PULSE(DI5)
4
Communication
5
AI1+AI2
6
MAX(|AI1|,|AI2|)
7
MIN(|AI1|,|AI2|)
8
It is used to select the feedback channel of PID
Feedback value of process PID is a relative value, set range is 0.0%~100.0%.
PA.03
PID action direction
Positive action
0
0
☆
Negative action
1
Positive action
:
If the feedback signal is smaller than the PID reference signal, it is required to boost
the output frequency of the inverter to make PID reach balance. The winding tension PID control is such a
case.
Negative action
:
If the feedback signal is smaller than the PID reference signal, it is required to
decrease the output frequency of the inverter to make PID reach balance.The unwinding tension PID
control is such a case.
This function is influenced by function 35,please pay attention during operation.
PA.04 PID reference feedback range
0~65535
1000
☆
PID reference feedback range is a dimensionless unit which is used to display U0.15 PID setup and
U0.16 PID feedback.
PID reference feedback related to the value 100.0%, corresponding to a given feedback range PA.04.If
PA.40 is set to 2000,PID is set to 100.0%,PID given display U0.15 is 2000.
PA.05
Proportional gain K
p1
0.0~100.0
20.0
☆
PA.06
Integration time Ti
1
0.01s~10.00s
2.00s
☆
PA.07
Differential time Td
1
0.00~10.000
0.000s
☆
Proportional gain K
p1
:
the parameter determines the adjustable strength of PID regulator. The larger
P is, the greater the adjustable strength will be.When the parameter is set to 100.0, it means that when the
deviation between PID feedback value and reference value is 100.0%, the range for the PID regulator to
regulate the output frequency commands is the maximum frequency (integration effect and differential
effect are omitted).
Integration time Ti
1
:
determines the strength of PID integration regulation. The shorter the integration
time , the greater adjustable strength will be.Integration time means that when the deviation between PID
feedback value and reference value is 100%, the adjustment by the integration regulator (proportional
effect and differential effect are omitted) after continuous adjustment in this period reaches the maximum
frequency.
Содержание HV590 Series
Страница 1: ...HV590 Series Frequency Inverter User Manual HNC Electric Limited ...
Страница 189: ......
Страница 192: ......







































































