





























Securing the cable package in the lower arm
Note
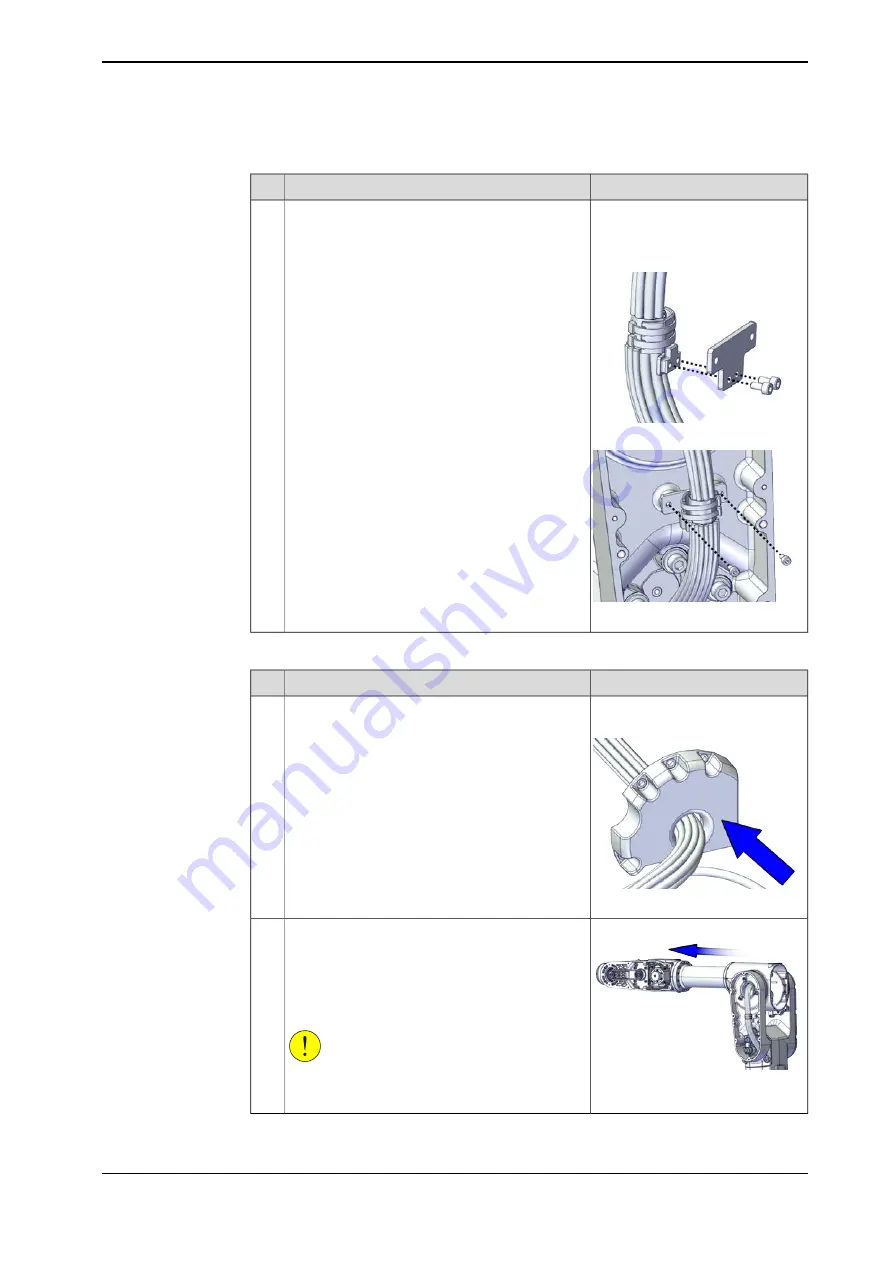
Action
Screw: M4x8 12.9 Lafre
2C2B/FC6.9 (2 pcs on the cable
package and 2 pcs on lower arm)
Refit the cable bracket.
1
Tightening torque: 2.6 Nm
xx2100001465
xx2000001553
Routing the cable package in the housing
Note
Action
Plastic cable protector, axis 4:
Slip the axis-4 cable protector over the cable
package.
1
3HAC064694-001:
xx2000001570
xx2000001571
Insert the cable package through the hollow tube
of the axis-4 gearbox, into the extender unit (only
for CRB 1300-7/1.4 and ) and into the tubular.
Make sure that:
•
the air hoses are facing the axis-3 gearbox
side in the hollow tube of axis-4 gearbox.
CAUTION
Make sure that no cables or hoses are twisted or
strained. Reroute if necessary.
2
Continues on next page
Product manual - CRB 1300
591
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
5 Repair
5.7.2 Replacing the axis-2 gearbox
Continued
Содержание CRB 1300
Страница 1: ...ROBOTICS Product manual CRB 1300 ...
Страница 2: ...Trace back information Workspace 23A version a14 Checked in 2023 03 20 Skribenta version 5 5 019 ...
Страница 50: ...This page is intentionally left blank ...
Страница 662: ...This page is intentionally left blank ...
Страница 690: ...This page is intentionally left blank ...
Страница 704: ...This page is intentionally left blank ...
Страница 720: ...This page is intentionally left blank ...
Страница 725: ......







































































