




























5 Log in the RobotStudio using the admin use account and configure the device
to make sure the device communication works.
a Click the
Controller
tab and, in the
Controller
pane, choose
I/O System
>
EtherNetIP
.
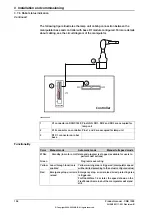
Information of three devices can be observed:
- CabinetIO is used for the I/O device DSQC1030, and the
communication status is normal.
- ABB_Scalable_IO and ABB_Scalable_IO1 are used for the I/O device
DSQC1042, and the communication status is abnormal.
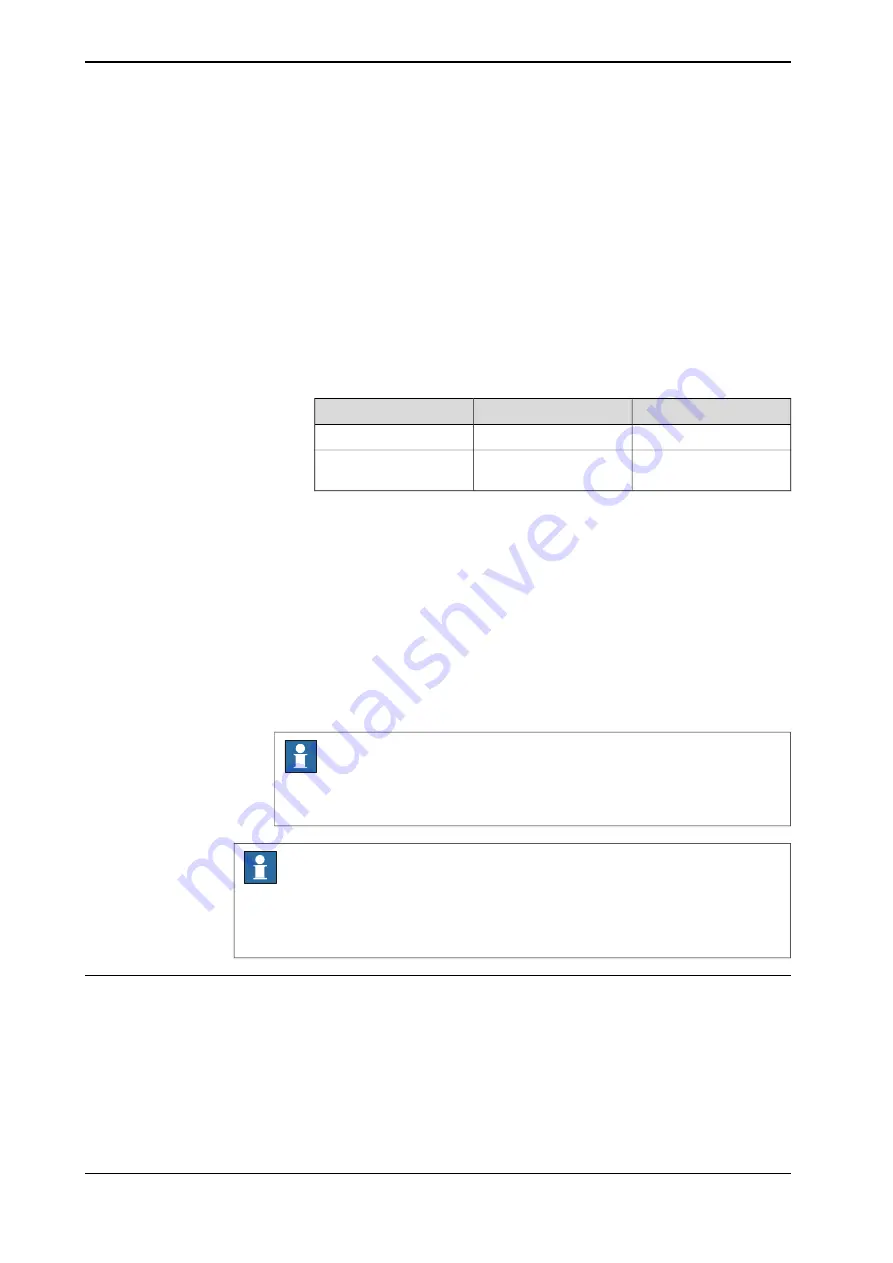
b Check the IP address and serial numbers associated with
ABB_Scalable_IO and ABB_Scalable_IO1, which will display as follows.
Serial number
IP address
Device name
0
192.168.125.130
ABB_Scalable_IO
Actual serial number of
the device
192.168.125.131
ABB_Scalable_IO1
c Right-click
ABB_Scalable_IO1
and choose
Configure
from the shortcut
menu.
d In the displayed dialog box, choose the
Configure as replacement
device
option and select
ABB_Scalable_IO
from the drop-down list.
e Remove the texts in the
Create new I/O signals using name prefix
text box and then click
OK
.
Information of two devices can be observed, CabinetIO and
ABB_Scalable_IO. Communication status of ABB_Scalable_IO will turn
to normal after the SafeMove template file is uploaded using the
SafeMove configurator app.
Note
The configuration could also be done using the I/O application in
FlexPendant.
Note
If there are additional scalable I/O devices available, install and configure the
additional devices by following the detailed procedures in
Application
manual - Scalable I/O
.
Configuring SafeMove
To enable SafeMove, perform the following procedure:
1 Log in the FlexPendant.
Make sure the user logged in have access grants to lock safety controller
configurations, safety services and software synchronization.
2 Tap
SafeMove
on the home page.
Continues on next page
148
Product manual - CRB 1300
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.5.5 Configuration of one SafetyIO-base laser scanner (RobotWare 7.6 or later)
Continued
Содержание CRB 1300
Страница 1: ...ROBOTICS Product manual CRB 1300 ...
Страница 2: ...Trace back information Workspace 23A version a14 Checked in 2023 03 20 Skribenta version 5 5 019 ...
Страница 50: ...This page is intentionally left blank ...
Страница 662: ...This page is intentionally left blank ...
Страница 690: ...This page is intentionally left blank ...
Страница 704: ...This page is intentionally left blank ...
Страница 720: ...This page is intentionally left blank ...
Страница 725: ......







































































