





























System Setup
9
-
167
9.11
All limit release function
WARNING!
Risk of injury due to crushing, material damage due to sudden robot movements
To operate the robot with all limits released, pay extra attention to ensure the safety of the
surrounding operation environment.
The following limits can be released with the all limit release function:
NOTICE
All limit release function is not available if the SECURITY mode is not in the
MANAGEMENT mode.
Refer to chapter 8 "Security system" for details on the SECURITY modes.
1. Select {ROBOT} from the main menu.
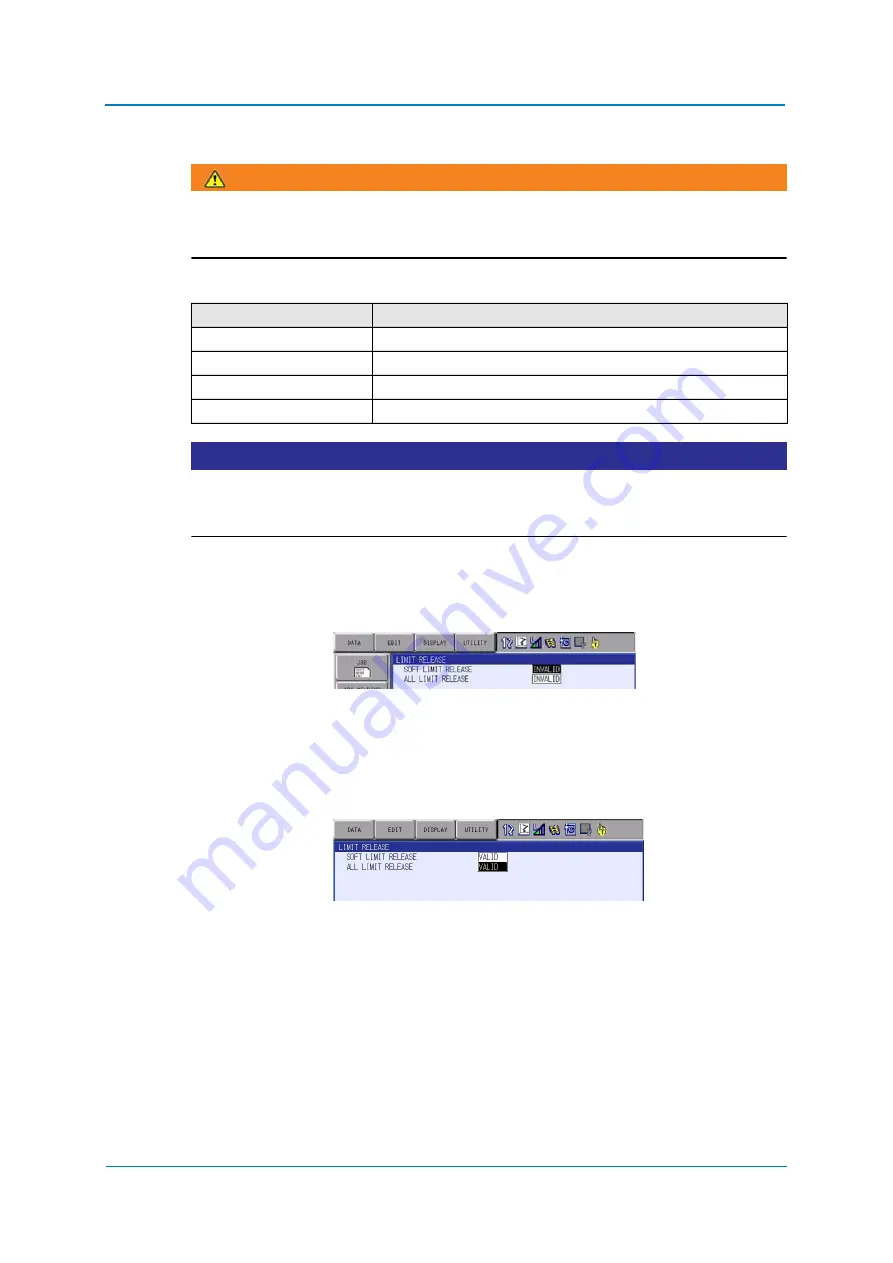
2. Select {LIMIT RELEASE}.
–
The LIMIT RELEASE window appears.
3. Select “ALL LIMITS RELEASE”.
–
“VALID” and “INVALID” are displayed alternately every time [SELECT] is pressed.
–
When ALL LIMITS RELEASE is changed to “VALID,” the message “All limits have been
released” appears. When the setting changes to “INVALID”, the message “All limits off
released” is displayed for a few seconds.
Limit type
Content
Mechanical limit
Limit to check robot’s range of motion.
L-U interference
Limit to check L- and U-axis interference area.
Soft limit on each axis
Soft limit to check robot’s range of motion.
Cube interference
Limit to check cube interference area set by user.
Summary of Contents for YRC1000
Page 1: ...ROBOTICS Instructions Robot controller User manual ...
Page 30: ...Supply 3 30 Hood for CEE connector Covers ...
Page 51: ...Connection 5 51 8 Close the YRC1000 door ...
Page 142: ...System Setup 9 142 6 Select YES All data of the interference signal number is deleted ...
Page 174: ...System Setup 9 174 7 Press ENTER The speed is modified ...
Page 219: ...System Setup 9 219 4 Select GRAPH The graph appears 4 5 6 7 8 9 10 1 2 3 ...
Page 453: ...Description of Units and Circuit Boards 15 453 ...





















































