





























Set Up for Construction Operation
2-47
2
Motion 4000
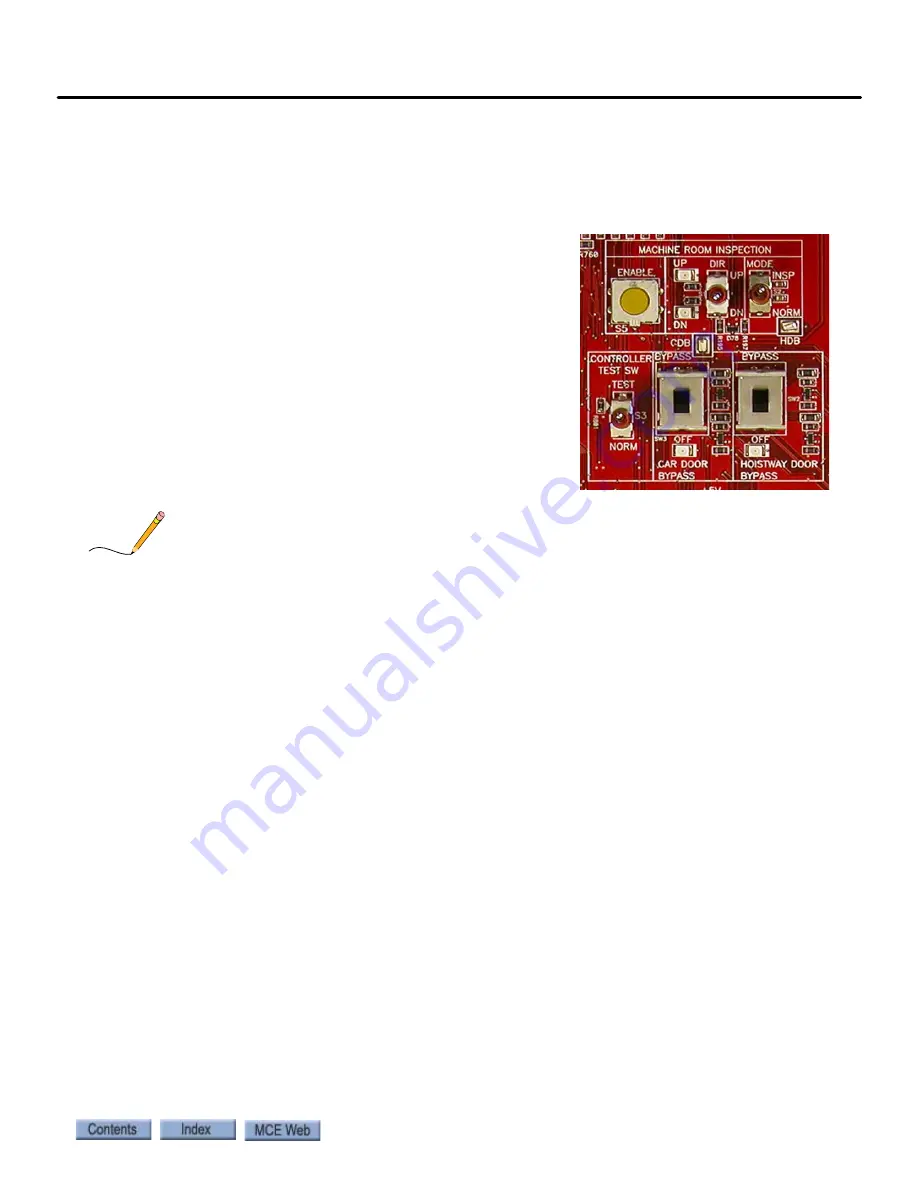
Using Inspection Stations to Run
In inspection, a car operates at slow speed using up and down buttons. The car will stop when
the buttons are released.
Encoder Polarity (KEB, TorqMAX)
1. Place the car on Inspection mode.
2. Press and hold the ENABLE button while using the
Direction toggle to run the car up or down. The
brake and motor contactors should pick; the car
should move.
3. Set drive parameter LF.93 to display motor current.
4. If the car oscillates at zero speed, moves at slow
speed, or trips the E.ENCC drive fault, change drive
parameter LF.28 (0 to/from 1) to internally swap
encoder channels. If the motor draws normal cur-
rent (LF.93 = 30 - 40% of motor FLA) but the car
moves in the opposite of the direction commanded,
set LF.28 to “2” to reverse motor rotation.
Note
KEB E.ENCC Fault: If a malfunction occurs, the drive shuts down and the display is overwritten
with an error message. After correction, most errors can be cleared by pressing the Enter key.
E.ENCC errors however can only be cleared through Parameter 0LF.26. If the drive displays
E.ENCC, refer to the LF.26 explanation in the drive manual.
Align Encoder (Magnetek)
HPV 600/900/900II
1. Move the elevator on Inspection and verify that the motor is under control and rotating
in the proper direction.
For proper operation, motor phasing must match encoder feedback phasing. If the phasing is
not correct, the motor will not accelerate up to speed. It will typically oscillate back and forth at
zero speed and the current will be at the torque limit.
2. If the motor operates as described above, verify that the encoder is wired as shown in
the prints. If it is, swap any two motor phases.
3. If the motor operates properly but is turning in the wrong direction, change the Motor
Rotation parameter in the drive C1 User Switches menu.
HPV 600PM
1. Place the controller on Inspection.
2. Set Inspection Speed (normal), controller F7, 155, to 1/8 of Contract Speed.
3. In the controller F3, Controller Utilities menu, set Inspection Mode Fault Bypass to ON.
(Jumper must be in place on HC-CTL board Fault Reset Jumper J1.)
4. Refer to and follow the Absolute Encoder Alignment Procedure, Auto Alignment Proce-
dure in the Magnetek HPV 600PM AC Drive technical manual.
5. Restore controller to original settings.
Summary of Contents for Motion 4000
Page 20: ...xiv Manual 42 02 2P24 5 20 13 ...
Page 38: ...Motion 4000 Traction Elevator Control 1 18 Manual 42 02 2P24 ...
Page 178: ...Final Adjustments 3 56 Manual 42 02 2P24 ...
Page 322: ...User Interface 4 144 Manual 42 02 2P24 ...
Page 391: ...PC Board Quick References 5 69 5 Motion 4000 Figure 5 11 Example MC CPI Wiring ...
Page 439: ...Customer Notations A 27 A Motion 4000 Customer Notations Table A 4 Customer Notation Area ...
Page 444: ...Appendix A 32 Manual 42 02 2P24 ...







































































