





















Page 7
Functional Principle, Technical Data
CSP2008
2.
Functional Principle, Technical Data
2.1
Functional Principle
The CSP2008 Universal Controller is used for processing at least 2, maximum 6 digital or
analog input signals (2x in 4x external via EtherCAT modules from the Beckhoff
company). EtherCAT is also possible as external interface for the connection of further
sensors and further I/O modules. The universal controller CSP2008 is the EtherCAT mas-
ter and can not communicate with other EtherCAT masters e.g. such as in a PLC.
Features:
-
Processing of 6 input signals
-
Programmable using buttons or via Ethernet (websites)
-
Semi-automatic sensor detection for MICRO-EPSILON sensors with digital output
-
DIN rail mounting (TS 35)
-
Triggering, synchronization and other functions
-
Ethernet interface with TCP and UDP protocols
-
EtherCAT interface for the connection of additional I/O modules, e.g. of Beckhoff com-
pany or sensors with EtherCAT interface.
-
Real-time capability up to 100 kHz
ESC
Sync/T
rig
Shield
Shield
Shield
Ana1
Out1
Out2
Sync/Out
GND
GND
GND
GND
GND
A
Shield
Ana2
GND
A
Zero
GND
Laser
GND
24V
24V
PE
PE
0V
0V
Kanal 1 in mm
+003.98
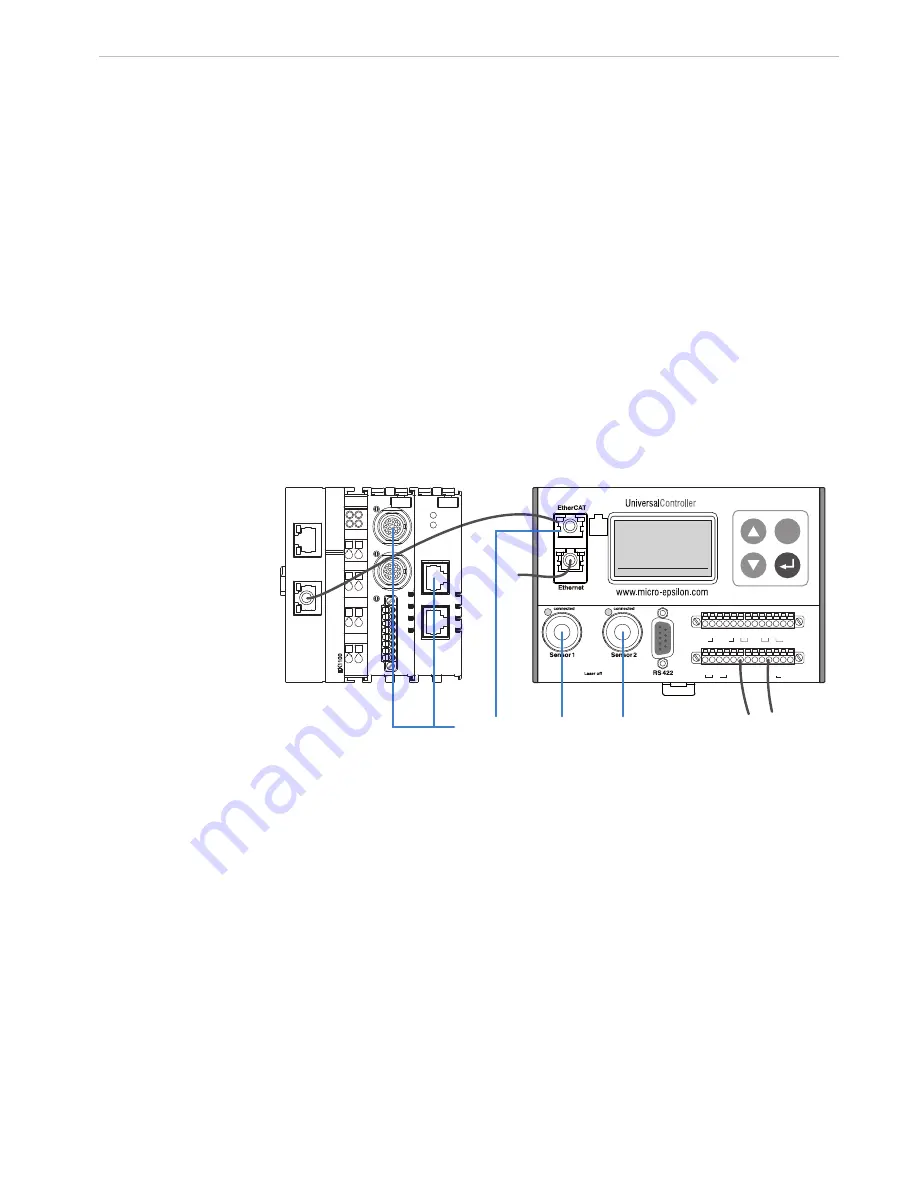
Sensors with digital output
Power supply
PC
RS422 extension
terminal
2-port EtherCAT
junction
EK1122
Fig. 1 Front view and elements
The CSP2008 controller is installed in a stable plastic case similar to a control panel
which can easily be attached to a DIN rail TS35 using a clamp on the rear side.
Two digital sensors can be directly connected to the controller via RS422 or EtherCAT. A
sensor can be directly connected to the EtherCAT connector on CSP2008 via EtherCAT.
Four other digital sensors can be connected to two RS422 extension terminals or two
EtherCAT junctions (EK1122) or via a RS422 extension terminal and an EtherCAT junc-
tion (EK1122) plus bus coupler by EtherCAT.
The parameterization of all inputs and outputs on the controller is performed via buttons
and the display or using a Web interface.
The controller calculates various input signals. All input signals in the input are scaled
on an internal number basis with a resolution of 1 nm and a maximum size of ±2.1 m for
this. In this way, the resolution and the scaling of the input variables for internal calcula-
tion does not have to be observed. A sensor change (or change of measuring range)
does not influence the internal calculation.
An internal time base also enables the calculation of measurement results of different
sensor types with various measuring frequencies.
Summary of Contents for CSP2008
Page 1: ...CSP2008 Instruction Manual Channel 1 in mm 14 452...
Page 79: ......







































































