





























7 Application Instructions API 50-99
D V P - P L C A P P L I C AT I O N M A N U A L
7-35
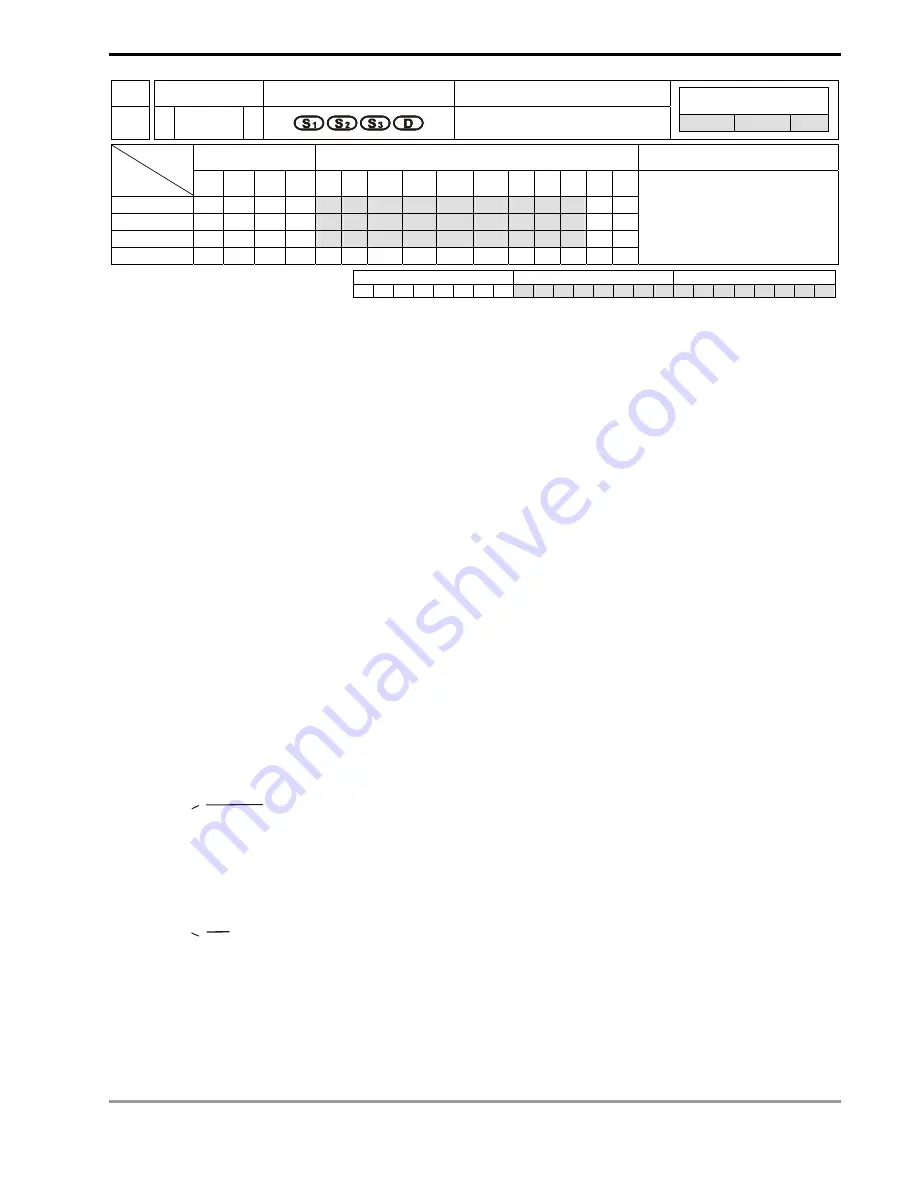
API Mnemonic
Operands
Function
59
D PLSR
Pulse Ramp
Controllers
ES/EX/SS SA/SX/SC EH/SV
Bit Devices
Word Devices
Program Steps
Type
OP
X Y M S K H
KnX KnY KnM KnS T
C
D
E
F
S
1
*
*
*
*
*
*
*
*
*
*
*
S
2
*
*
*
*
*
*
*
*
*
*
*
S
3
*
*
*
*
*
*
*
*
*
*
*
D
*
PLSR: 9 steps
DPLSR: 17 steps
PULSE 16-bit 32-bit
ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV
Operands:
S
1
: Maximum speed of pulse output
S
2
: Total number of output pulses
S
3
: Acceleration/deceleration time (ms)
D
: Pulse output device (please use transistor output module)
Explanations:
1.
See the specifications of each model for their range of use.
2.
For ES/EX/SS series MPU, PLSR instruction can be used twice in the program but the outputs cannot be
overlapped.
3.
Flags: See remarks of API 57 PLSY.
4. Range
of
S
1
: 10 ~ 32,767Hz (16-bit); 10 ~ 200,000Hz (32-bit). The maximum speed has to be 10’s multiple; if
not, the 1s digit will be left out. 1/10 of the maximum speed is the variation of one acceleration or deleration.
Please be aware if the variation reponds to the acceleration/deceleration demand from the step motor, in case
the step motor may crash.
5. Range
of
S
2
: 110 ~ 32,767 (16-bit); 110 ~ 2,147,483,647 (32-bit). If
S
2
is less than 110, the pulet output will be
abnormal.
6. Range
of
S
3
: below 5,000ms. The acceleration time and deceleration time have to be the same.
a) The acceleration/deceleration time has to be 10 times longer than the maximum scan time (D1012). If not,
the slope of accleration and deceleration will be incorrect.
b) The minimum set value of acceleration/deceleration time can be obtained from the following equation:
90,000
>
S
3
S
1
If the set value is less than the result obtained from the equation, the acceleration/deceleration time will be
longer. If the set value is less than 90,000/
S
1
, use the result of 90,000/
S
1
as the set value.
c) The maximum set value of acceleration/deceleration time can be obtained from the following equation:
818
S
1
S
2
S
3
<
X
d) The speed variation is fixed to 10 steps. If the input acceleration/deceleration time is longer than the
maximum set value, the acceleration/deceleration time will follow the maximum set time. If shorter than the
minimum set value, the accleration/deceleration time will follow the minimum set time.
Summary of Contents for DVP-PLC
Page 1: ...PLC PLC...
Page 28: ...1 Basic Principles of PLC Ladder Diagram DVP PLC Application Manual 1 24 MEMO...
Page 192: ...4 Step Ladder Instructions DVP PLC Application Manual 4 22 MEMO...
Page 472: ...8 Application Instructions API 100 149 DVP PLC Application Manual 8 70 MEMO...
Page 574: ...9 Application Instructions API 150 199 DVP PLC Application Manual 9 102 MEMO...







































































