





























Rockwell Automation Publication 2198-UM004A-EN-P - October 2019
195
Modes of Operation
Chapter 10
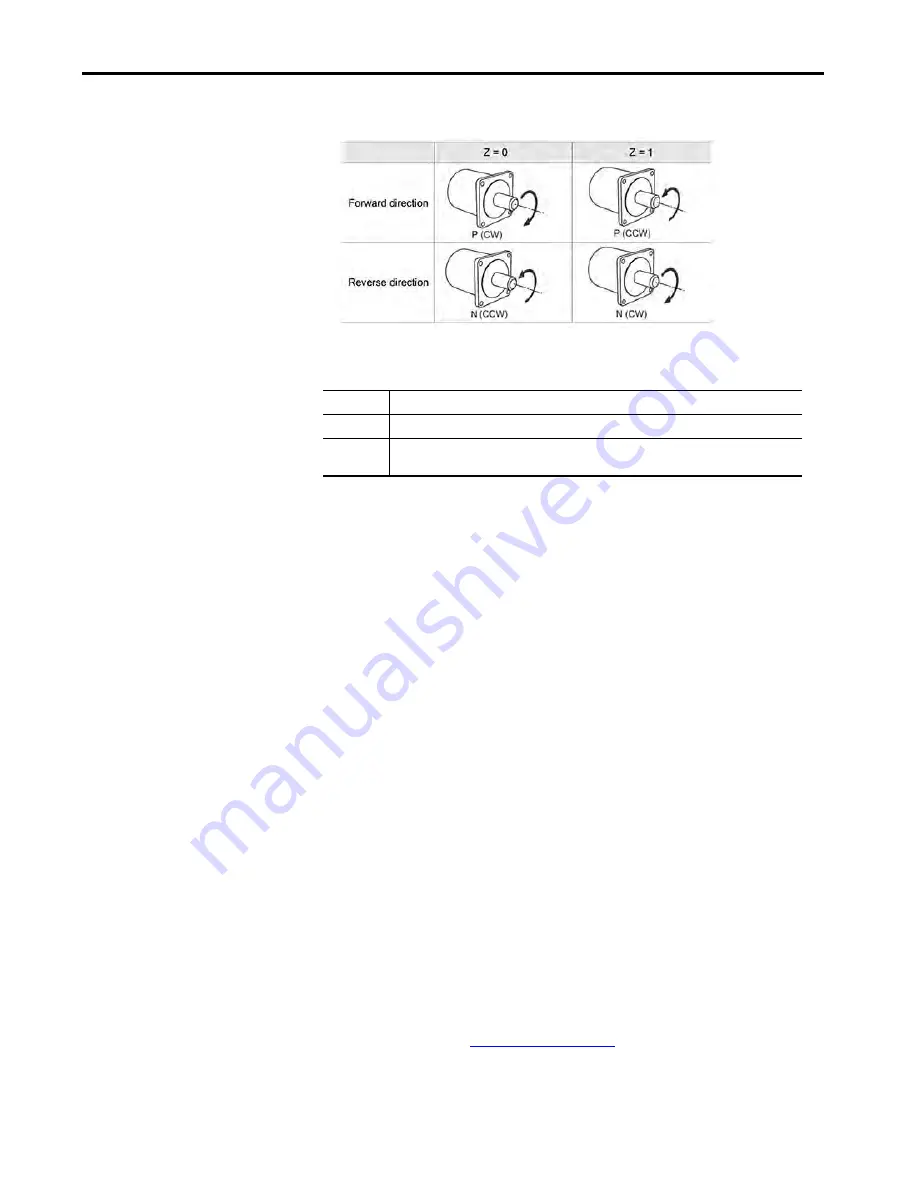
Z: Direction Control
U: DIO Setting Value Control
The following sections describe the operation of each mode, including the mode
structure, command source, selection and processing of the command, and gain
adjustment.
Position Control
Three input modes for position control are available on the drive: External pulse
or analog input (PT mode), internal register (PR mode) and I/O mode. In PT
mode, the servo drive is able to receive pulse command of directions (motor runs
forward or reverse), and the rotation angle of motor can be controlled by the
input pulse. The drive can receive pulse command of up to 4 million packets per
second (Mpps).
You can also complete the position control by internal register (PR) without
external pulse command. The drive provides 99 command registers with two
input modes:
• You can set the 99 registers first before switching the drive to Servo On
state and set DI.POS0…DI.POS6 signals of the I/O connector for the
switch.
• You can directly set the register values via communication.
The position command can also come from the controller when ID117 (P1.001)
is set to 0xC (I/O mode). There are two types of command inside:
• Target Position (position mode)
• External Pulse PTO input
(gear mode)
• Auxiliary port input (gear mode)
Details can be found in
Setting No.
Description
0
When switching modes, DIO settings ID195…ID207 (P2.010…P2.022) remain the same value.
1
When switching modes, DIO settings ID195…ID207 (P2.010…P2.022) and ID220...ID225
(P2.036...P2.041)are reset to the default of each mode.
Summary of Contents for Kinetix 5100 2198-E1004-ERS
Page 499: ......