


























UM353-1B
Function Blocks
April 2012
3-75
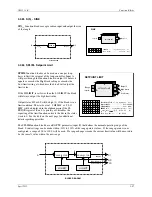
POWER UP - During a warm or cold power up, the output will be initialized to MINSCALE and all dynamic
elements will be initialized at the current input on the first scan.
Input AG is multiplied by the gain error (GE). An unconnected AG input will be set to 1.0.
The controller output has MINSCALE and MAXSCALE parameters allowing the output signal to be scaled for
engineering ranges other than the default of 0 - 100 PRCT. This may be necessary when the controller output is the
setpoint to another controller.
The Autotune feature is accessible using the TUNE pushbutton when AUTOTUNE is set to YES and can be
initiated while the loop is in Auto or Manual. The autotuner, when initiated, replaces the PIDAG with an on-off
control function, places the A/M block in Auto (if in Man) and cycles the control loop through six on-off cycles
while learning the process dynamics which it uses to provide tuning recommendations for the PIDAG controller.
The % DEV parameter is the maximum amount in % that the process should deviate from the setpoint during the
on-off cycles. This parameter can be set manually or can be configured as AUTO. When AUTO is configured, the
autotuner will set the % DEV to 4 times the % HYS. This is the minimum value needed to provide good autotuning
results.
The % HYS parameter is the amount that the process must deviate from setpoint before switching the output in the
opposite direction. This value must be at least equal to or slightly greater than any process noise band. If the noise
band cannot be determined, the autotuner will compute it at the start of an autotuning exercise when the % HYS
parameter has been configured as AUTO.
The % STEP parameter is the amount that the valve will change on the first on-off cycle. After the first cycle, the
autotuner will adjust the step to keep the process within the value of the % DEV parameter. On subsequent
autotune exercises, the step will use the value computed from the previous exercise unless the AT RESET parameter
is set to YES or the controller has been power cycled. The dynamic response recommended by the autotuner can be
configured as Fast, Medium, or Slow. The Medium setting will normally provide a response that has no or little
overshoot to a setpoint step response.
When the POST AT parameter is set to YES, the control loop will be returned to Auto using the recommended
tuning values unless a warning occurred during the test.
More details on autotuning can be found in Section 8 Local Faceplate Operation.
Содержание 353
Страница 12: ...Contents UM353 1B x April 2012 ...
Страница 22: ...Introduction UM353 1B April 2012 1 10 ...
Страница 30: ...Configuration Overview UM353 1B April 2012 2 8 ...
Страница 122: ...Function Blocks UM353 1B April 2012 3 92 ...
Страница 168: ...Data Mapping UM353 1B April 2012 6 28 ...
Страница 204: ...Controller and System Test UM353 1B April 2012 9 8 ...
Страница 222: ...Calibration UM353 1B April 2012 11 4 ...
Страница 226: ...Circuit Description UM353 1B April 2012 12 4 ...
Страница 238: ...Model Designation and Specifications UM353 1B April 2012 13 12 EC Declaration of Conformity ...
Страница 239: ...UM353 1B Model Designation and Specifications April 2012 13 13 Annex A to the EC Declaration of Conformity ...
Страница 240: ...Model Designation and Specifications UM353 1B April 2012 13 14 ...
Страница 244: ...Abbreviations And Acronyms UM353 1B 14 4 April 2012 ...







































































