



























Sonar module / sonar channel
Minimum depth
Maximum depth
RealVision™ 3D
0.6 m (2 ft)
91 m (300 ft)
SideVision™
0.6 m (2 ft) each
side
91 m (300 ft) each
side
DownVision™
0.6 m (2 ft)
183 m (600 ft)
HyperVision™ (RealVision™ 3D,
SideVision™ or DownVision™)
0.6 m (2 ft)
38 m (125 ft)
CHIRP sonar channel (when using
RealVision™ 3D, SideVision™ or
DownVision™ transducers
0.6 m (2 ft)
274 m (900 ft)
Sonar minimum depths
Accurate bottom tracking can be unreliable in depths shallower than
0.8 m/2.62 ft. When operating at or below this depth be cautious of
misleading sonar returns, false bottom tracking and incorrect depth readings
The Minimum sonar depth alarm is triggered when your vessel reaches or is
in water shallower than this depth.
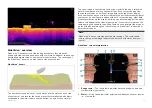
Below are examples of the Sonar app when it is tracking a false bottom in
shallow waters.
1.
Examples of incorrect depth readings due to false bottom tracking.
2. Actual bottom tracking and water depth.
3.
False bottom tracking providing false depth readings.
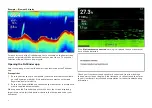
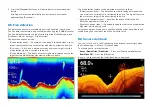
8.3 Fishfinder app overview
The Fishfinder app displays a visualization of the echoes received from the
transducer connected to your display and builds an underwater scrolling view
of bottom structure and targets that pass under your transducer. Fishfinder
channels are available that represent the different sonar technologies that
are available depending on your display variant and connected transducer.
Example — Element HV display
97







































































