





























Drive parameters Communications
44
Commander S100 User Guide
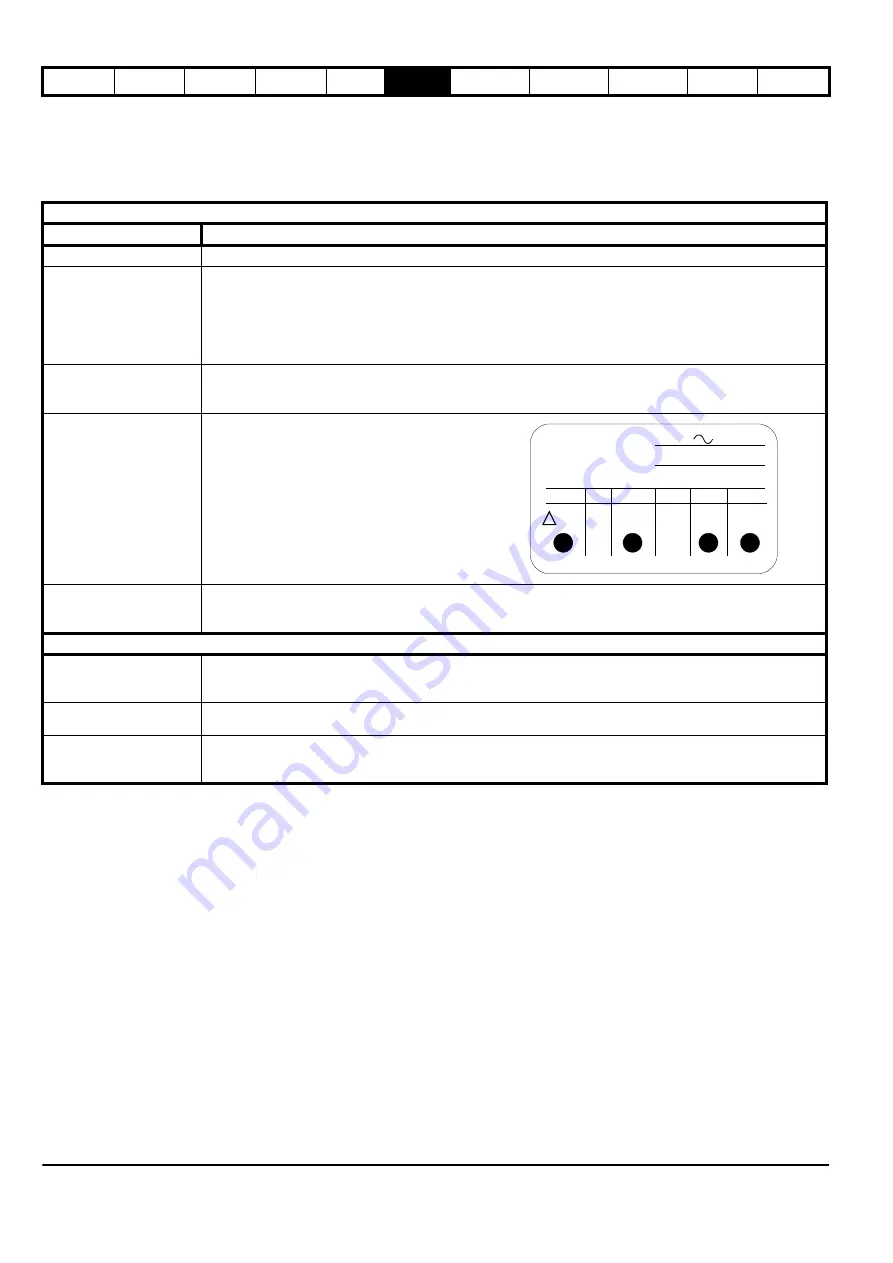
6 Running the motor
6.1 Basic setup
It is recommended to use the FastStart option within Marshal to commission the drive. Alternatively, the keypad can be used to edit drive parameters
directly using the keypad instructions in section 5
.
Configure
Action
Detail
Power
Power the drive, ensure the drive is not enabled. (Display shows: inh)
Enter
1. Minimum Frequency Limit P0.01 (Hz)
2. Maximum Frequency Limit P0.02 (Hz)
Typically the maximum frequency limit is the motor rated frequency.
3. Acceleration Rate 1 P0.03 (s)
4. Deceleration Rate 1 P0.04 (s)
These parameters define ramp times between 0 Hz and
Maximum Frequency Limit
P0.02.
Select
5. Frequency Reference Configuration P0.05
This parameter configures the drive speed control. See details within Marshal
Enter Motor Nameplate
Details
6. Motor Rated Current P0.06 (A)
7. Motor Rated Speed P0.07 (rpm)
8. Motor Rated Voltage P0.08 (V)
9. Motor Rated Power Factor P0.09 (cos
Φ
)
Select
10. Run/Stop Configuration P0.10
This parameter configures how to run the drive. See details within Marshal
or section 6.3
Running and Speed Control (Default Configuration Settings)
Run
Always ensure it is safe to start the motor before doing so.
Provide an Enable signal to terminal 12 (T12).
Provide a run signal to T13 (Run Forward) or T14 (Run Reverse).
Increasing and Decreasing
Motor Speed
Increase or decrease current to analog input 1 (T2) to increase or decrease the frequency reference. Close digital
input 5 (T15) to switch to a voltage reference from analog input 2 (T4).
Stopping
Remove the Run Forward (T13) or Run Reverse (T14) signal to stop the motor by following the selected deceleration
rate. If the Enable signal (T12) is removed while the motor is running, the drive output is immediately disabled, and
the motor will coast to a stop.
V
Hz
min
-1
kW
cos
Փ
A
230
50
1480
0.75
0.8
1.1
IP55
I cl.f
40 °C
S1
N°734570 BJ 02 kg 9
MOT.3
LS 80 L T
6
8
7
9
Содержание COMMANDER S100
Страница 118: ...0478 0650 02...







































































