





























Commander S100 User Guide
87
P5.08
PID Integral Gain
Range:
0.000 to 4.000
Default:
0.500
The integral gain is an amplification factor of the error over time.
The PID integral gain increases the
PID Output Percentage
(P1.19) at a rate proportional to the error and the gain.
Setting a value of 0 disables the integral term. Setting an integral value will remove any steady state error.
For a
PID error
= 10 % and an integral gain of 0.5, then the integral term increases linearly by 5 % per second.
P5.09
PID Output Lower Limit
Range:
-100.00 to 100.00 %
Default:
0.00 %
The output of the PID controller is limited to this level. If the limit is reached, Bit 1 in
PID Status Indicators
(P1.20) is set and the integrator is
prevented from decreasing further.
P5.10
PID Output Upper Limit
Range:
0.00 to 100.00 %
Default:
100.00 %
The output of the PID controller is limited to this level. If the limit is reached, Bit 1 in
PID Status Indicators
(P1.20) is set and the integrator is
prevented from increasing further.
P5.11
PID Enable Selector
Range:
0 to 11
Default:
0 (None)
Selects an internal condition that can be used to enable the PID controller.
If it is required that an internal condition should be used to enable the PID, this parameter should be set to the required condition. For example, if it
is required that the Threshold Detector should enable the PID, this parameter should be set to 11.
Enabling the PID is dependent on two conditions, the value set in this parameter and any digital input function that has been configured to PID
Hardware Enable (13).
Bit 0 in
PID Status Indicators
(P1.20) indicates whether the PID is enabled or not.
the value of this parameter can be set by
Frequency Reference Configuration
(P2.03).
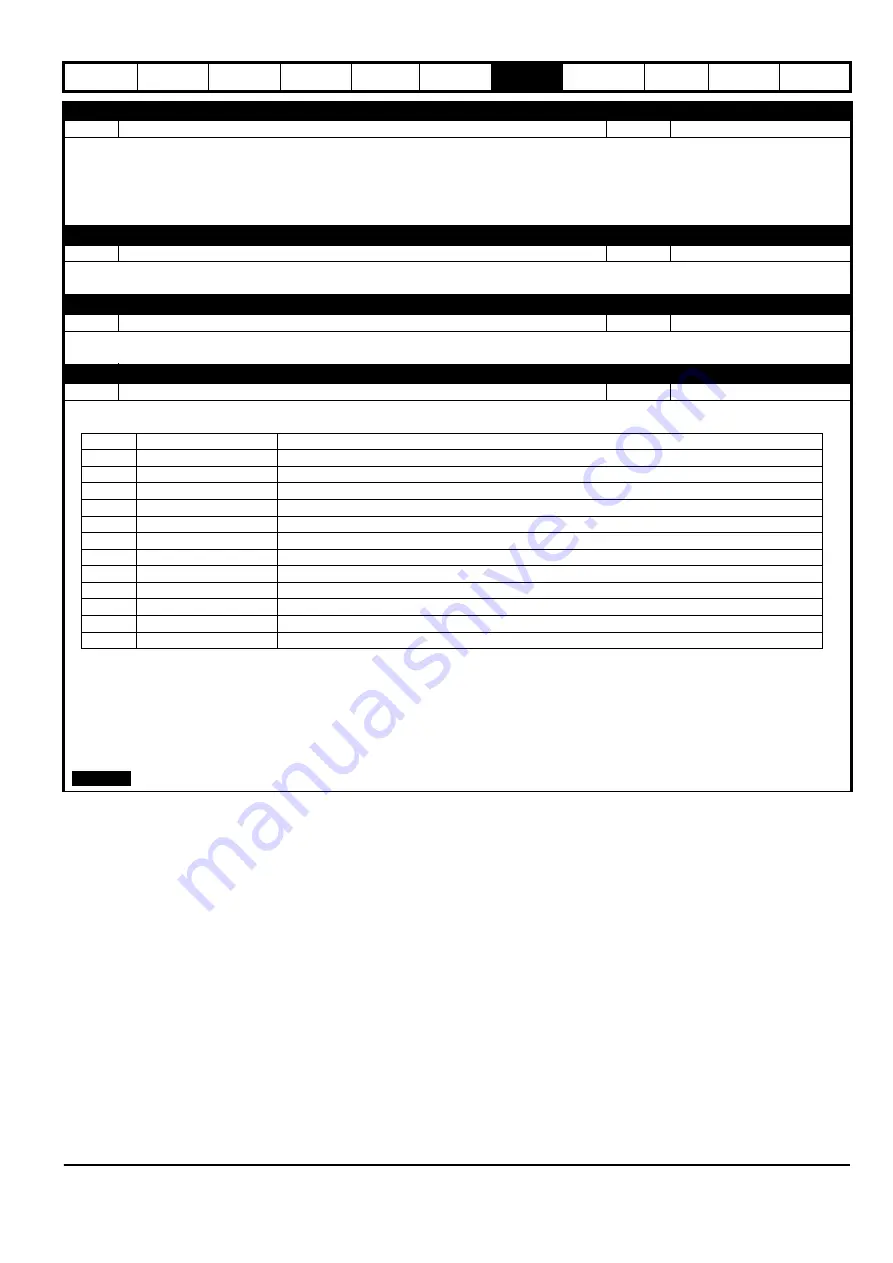
Value
PID Enable Condition
Description
0
Disabled
Always Off
1
Drive Running
Enabled if the drive is running
2
At Speed
Enabled if the output speed is within 1 Hz of the reference
3
At Zero
Enabled if the output is at 0 Hz +/- 2 Hz
4
Under Voltage
Enabled if the drive is in the under voltage state
5
External Error
Enabled if the external error input has been set
6
Drive Ready
Enabled if the drive is ready to run (not inhibited by a hardware enable input)
7
Drive Healthy
Enabled if the drive is healthy (not in error) (active alarms do not make the drive unhealthy)
8
Current Limit
Enabled if the drive is limiting the output current
9
Reverse Running
Enabled if the drive is running in the reverse direction
10
Current Loss
Enabled if an analog input current loss has been detected
11
Threshold Detect
Enabled if the threshold detector is active
NOTE
Содержание COMMANDER S100
Страница 118: ...0478 0650 02...







































































